
 职场资讯
职场资讯
正在查看在校生规控算法大气简历模板文字版
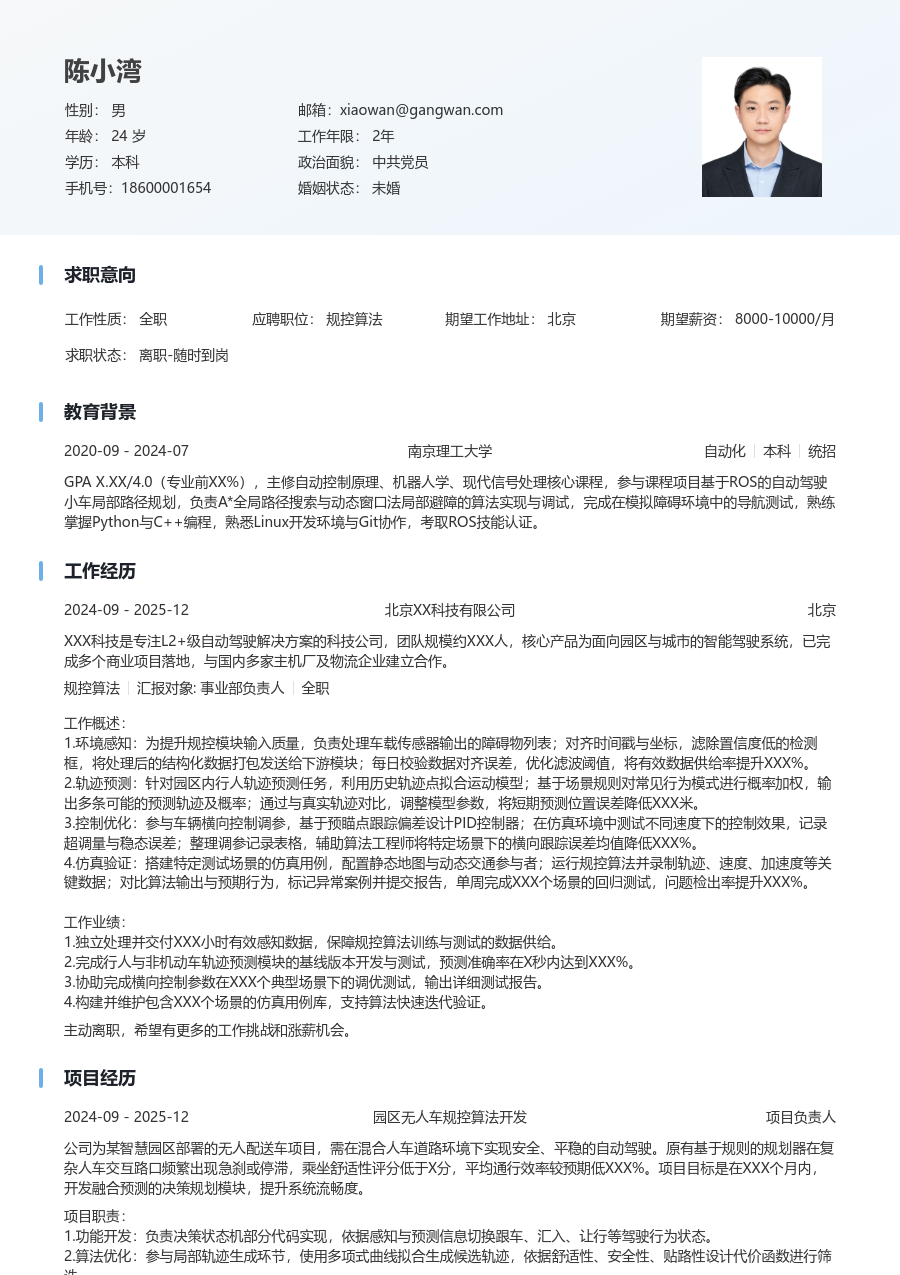
陈小湾
求职意向
工作经历
XXX科技是专注L2+级自动驾驶解决方案的科技公司,团队规模约XXX人,核心产品为面向园区与城市的智能驾驶系统,已完成多个商业项目落地,与国内多家主机厂及物流企业建立合作。
工作概述:
1.环境感知:为提升规控模块输入质量,负责处理车载传感器输出的障碍物列表;对齐时间戳与坐标,滤除置信度低的检测框,将处理后的结构化数据打包发送给下游模块;每日校验数据对齐误差,优化滤波阈值,将有效数据供给率提升XXX%。
2.轨迹预测:针对园区内行人轨迹预测任务,利用历史轨迹点拟合运动模型;基于场景规则对常见行为模式进行概率加权,输出多条可能的预测轨迹及概率;通过与真实轨迹对比,调整模型参数,将短期预测位置误差降低XXX米。
3.控制优化:参与车辆横向控制调参,基于预瞄点跟踪偏差设计PID控制器;在仿真环境中测试不同速度下的控制效果,记录超调量与稳态误差;整理调参记录表格,辅助算法工程师将特定场景下的横向跟踪误差均值降低XXX%。
4.仿真验证:搭建特定测试场景的仿真用例,配置静态地图与动态交通参与者;运行规控算法并录制轨迹、速度、加速度等关键数据;对比算法输出与预期行为,标记异常案例并提交报告,单周完成XXX个场景的回归测试,问题检出率提升XXX%。
工作业绩:
1.独立处理并交付XXX小时有效感知数据,保障规控算法训练与测试的数据供给。
2.完成行人与非机动车轨迹预测模块的基线版本开发与测试,预测准确率在X秒内达到XXX%。
3.协助完成横向控制参数在XXX个典型场景下的调优测试,输出详细测试报告。
4.构建并维护包含XXX个场景的仿真用例库,支持算法快速迭代验证。
主动离职,希望有更多的工作挑战和涨薪机会。
项目经历
公司为某智慧园区部署的无人配送车项目,需在混合人车道路环境下实现安全、平稳的自动驾驶。原有基于规则的规划器在复杂人车交互路口频繁出现急刹或停滞,乘坐舒适性评分低于X分,平均通行效率较预期低XXX%。项目目标是在XXX个月内,开发融合预测的决策规划模块,提升系统流畅度。
项目职责:
1.功能开发:负责决策状态机部分代码实现,依据感知与预测信息切换跟车、汇入、让行等驾驶行为状态。
2.算法优化:参与局部轨迹生成环节,使用多项式曲线拟合生成候选轨迹,依据舒适性、安全性、贴路性设计代价函数进行筛选。
3.仿真测试:在Carla仿真平台搭建园区道路模型,设计行人横穿、车辆加塞等边缘案例,批量测试算法鲁棒性。
4.工程实现:将Python算法原型用C++进行工程化移植,利用ROS框架实现与定位、控制模块的通信,确保实时性要求。
项目业绩:
1.决策规划模块按时交付,在仿真测试中,复杂路口通行成功率从XX%提升至XX%。
2.轨迹生成算法优化后,车辆横向加速度方差降低XXX%,乘坐舒适性评分提升至
X.X。
3.完成XXX+次仿真测试,发现并协助修复XX类逻辑缺陷,算法在验收测试中实现零碰撞。
4.工程化代码实现毫秒级响应,满足项目实时性要求,模块被集成至园区无人车正式版本中。
教育背景
GPA X.XX/4.0(专业前XX%),主修自动控制原理、机器人学、现代信号处理核心课程,参与课程项目基于ROS的自动驾驶小车局部路径规划,负责A*全局路径搜索与动态窗口法局部避障的算法实现与调试,完成在模拟障碍环境中的导航测试,熟练掌握Python与C++编程,熟悉Linux开发环境与Git协作,考取ROS技能认证。
自我评价
培训经历
通过该认证系统学习了C++面向对象、内存管理及标准模板库,并将相关知识应用于园区无人车项目的规控算法工程化移植,通过优化数据结构与减少拷贝,将关键函数的执行耗时降低XXX%,确保算法满足实时性要求,移植后的代码通过全部单元测试。
在校生规控算法大气简历模板
适用人群: #规控算法 #在校生[找实习]




关于规控算法简历的常见问题
[基本信息]
姓名:陈小湾
性别:男
年龄:26
学历:本科
婚姻:未婚
年限:4年
面貌:党员
邮箱:xiaowan@gangwan.com
电话:18600001654
[求职意向]
工作性质:全职
应聘职位:规控算法
期望城市:北京
期望薪资:8000-10000
求职状态:离职-随时到岗
[工作经历]
北京XX科技有限公司 | 规控算法
2024-09 - 2025-12
XXX科技是专注L2+级自动驾驶解决方案的科技公司,团队规模约XXX人,核心产品为面向园区与城市的智能驾驶系统,已完成多个商业项目落地,与国内多家主机厂及物流企业建立合作。
工作概述:
1.环境感知:为提升规控模块输入质量,负责处理车载传感器输出的障碍物列表;对齐时间戳与坐标,滤除置信度低的检测框,将处理后的结构化数据打包发送给下游模块;每日校验数据对齐误差,优化滤波阈值,将有效数据供给率提升XXX%。
2.轨迹预测:针对园区内行人轨迹预测任务,利用历史轨迹点拟合运动模型;基于场景规则对常见行为模式进行概率加权,输出多条可能的预测轨迹及概率;通过与真实轨迹对比,调整模型参数,将短期预测位置误差降低XXX米。
3.控制优化:参与车辆横向控制调参,基于预瞄点跟踪偏差设计PID控制器;在仿真环境中测试不同速度下的控制效果,记录超调量与稳态误差;整理调参记录表格,辅助算法工程师将特定场景下的横向跟踪误差均值降低XXX%。
4.仿真验证:搭建特定测试场景的仿真用例,配置静态地图与动态交通参与者;运行规控算法并录制轨迹、速度、加速度等关键数据;对比算法输出与预期行为,标记异常案例并提交报告,单周完成XXX个场景的回归测试,问题检出率提升XXX%。
工作业绩:
1.独立处理并交付XXX小时有效感知数据,保障规控算法训练与测试的数据供给。
2.完成行人与非机动车轨迹预测模块的基线版本开发与测试,预测准确率在X秒内达到XXX%。
3.协助完成横向控制参数在XXX个典型场景下的调优测试,输出详细测试报告。
4.构建并维护包含XXX个场景的仿真用例库,支持算法快速迭代验证。
[项目经历]
项目名称:园区无人车规控算法开发
担任角色:项目负责人
公司为某智慧园区部署的无人配送车项目,需在混合人车道路环境下实现安全、平稳的自动驾驶。原有基于规则的规划器在复杂人车交互路口频繁出现急刹或停滞,乘坐舒适性评分低于X分,平均通行效率较预期低XXX%。项目目标是在XXX个月内,开发融合预测的决策规划模块,提升系统流畅度。
项目业绩:
1.决策规划模块按时交付,在仿真测试中,复杂路口通行成功率从XX%提升至XX%。
2.轨迹生成算法优化后,车辆横向加速度方差降低XXX%,乘坐舒适性评分提升至
X.X。
3.完成XXX+次仿真测试,发现并协助修复XX类逻辑缺陷,算法在验收测试中实现零碰撞。
4.工程化代码实现毫秒级响应,满足项目实时性要求,模块被集成至园区无人车正式版本中。
[教育背景]
南京理工大学
自动化 | 本科
GPA X.XX/4.0(专业前XX%),主修自动控制原理、机器人学、现代信号处理核心课程,参与课程项目基于ROS的自动驾驶小车局部路径规划,负责A*全局路径搜索与动态窗口法局部避障的算法实现与调试,完成在模拟障碍环境中的导航测试,熟练掌握Python与C++编程,熟悉Linux开发环境与Git协作,考取ROS技能认证。