
 职场资讯
职场资讯
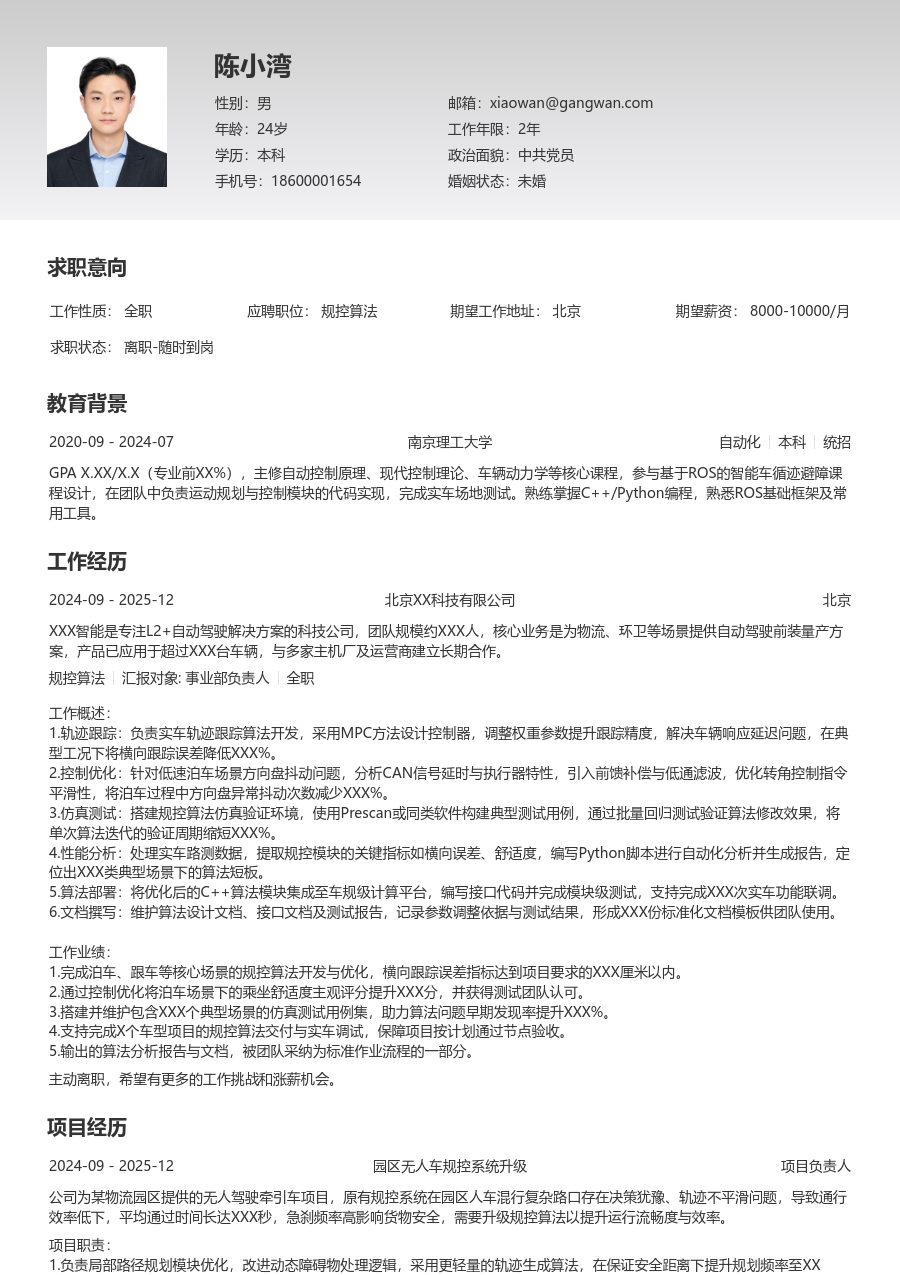
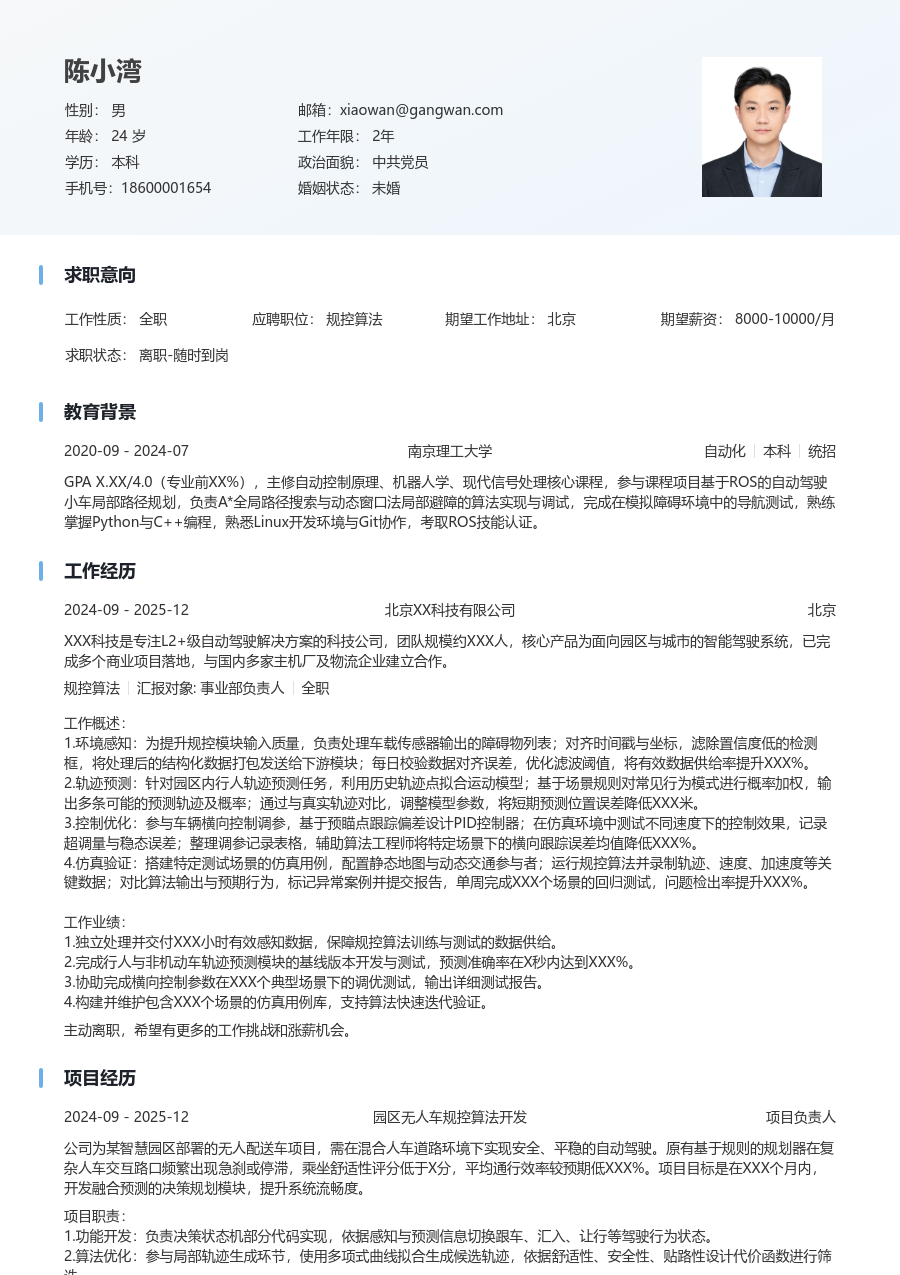
正在查看初级规控算法有序简历模板文字版
陈小湾
求职意向
工作经历
XXX智能是专注L2+自动驾驶解决方案的科技公司,团队规模约XXX人,核心业务是为物流、环卫等场景提供自动驾驶前装量产方案,产品已应用于超过XXX台车辆,与多家主机厂及运营商建立长期合作。
工作概述:
1.轨迹跟踪:负责实车轨迹跟踪算法开发,采用MPC方法设计控制器,调整权重参数提升跟踪精度,解决车辆响应延迟问题,在典型工况下将横向跟踪误差降低XXX%。
2.控制优化:针对低速泊车场景方向盘抖动问题,分析CAN信号延时与执行器特性,引入前馈补偿与低通滤波,优化转角控制指令平滑性,将泊车过程中方向盘异常抖动次数减少XXX%。
3.仿真测试:搭建规控算法仿真验证环境,使用Prescan或同类软件构建典型测试用例,通过批量回归测试验证算法修改效果,将单次算法迭代的验证周期缩短XXX%。
4.性能分析:处理实车路测数据,提取规控模块的关键指标如横向误差、舒适度,编写Python脚本进行自动化分析并生成报告,定位出XXX类典型场景下的算法短板。
5.算法部署:将优化后的C++算法模块集成至车规级计算平台,编写接口代码并完成模块级测试,支持完成XXX次实车功能联调。
6.文档撰写:维护算法设计文档、接口文档及测试报告,记录参数调整依据与测试结果,形成XXX份标准化文档模板供团队使用。
工作业绩:
1.完成泊车、跟车等核心场景的规控算法开发与优化,横向跟踪误差指标达到项目要求的XXX厘米以内。
2.通过控制优化将泊车场景下的乘坐舒适度主观评分提升XXX分,并获得测试团队认可。
3.搭建并维护包含XXX个典型场景的仿真测试用例集,助力算法问题早期发现率提升XXX%。
4.支持完成X个车型项目的规控算法交付与实车调试,保障项目按计划通过节点验收。
5.输出的算法分析报告与文档,被团队采纳为标准作业流程的一部分。
主动离职,希望有更多的工作挑战和涨薪机会。
项目经历
公司为某物流园区提供的无人驾驶牵引车项目,原有规控系统在园区人车混行复杂路口存在决策犹豫、轨迹不平滑问题,导致通行效率低下,平均通过时间长达XXX秒,急刹频率高影响货物安全,需要升级规控算法以提升运行流畅度与效率。
项目职责:
1.负责局部路径规划模块优化,改进动态障碍物处理逻辑,采用更轻量的轨迹生成算法,在保证安全距离下提升规划频率至XX Hz。
2.优化决策状态机,针对路口交互场景增加预见性决策逻辑,减少不必要的停车等待,使路口平均决策时间缩短XXX%。
3.协同感知团队定义并提供更稳定的目标物跟踪列表与预测信息,优化规控模块的输入数据质量。
4.推动实车测试与数据闭环,针对测试发现的XXX类典型问题场景进行算法参数调优与逻辑迭代。
项目业绩:
1.园区复杂路口通行效率提升XXX%,平均通过时间从XXX秒降至XXX秒。
2.车辆运行平顺性改善,急刹次数降低XXX%,货物安全性得到提升。
3.规控系统升级后,支持单车日均运行里程提升至XXX公里,满足园区扩大的运营需求。
4.项目成果获得客户验收通过,并作为标准方案推广至另外X个同类园区项目。
教育背景
GPA X.XX/X.X(专业前XX%),主修自动控制原理、现代控制理论、车辆动力学等核心课程,参与基于ROS的智能车循迹避障课程设计,在团队中负责运动规划与控制模块的代码实现,完成实车场地测试。熟练掌握C++/Python编程,熟悉ROS基础框架及常用工具。
自我评价
培训经历
2023年3月,完成该认证课程,系统学习自动驾驶规控模块架构。将课程中的预测与规划方法应用于实际园区车项目,优化了交互场景下的决策逻辑,使项目测试中路口通行效率提升了约XXX%。输出的学习总结与代码实践案例在团队内部进行了分享。
初级规控算法有序简历模板
适用人群: #规控算法 #初级[1-3年]

关于规控算法简历的常见问题
[基本信息]
姓名:陈小湾
性别:男
年龄:26
学历:本科
婚姻:未婚
年限:4年
面貌:党员
邮箱:xiaowan@gangwan.com
电话:18600001654
[求职意向]
工作性质:全职
应聘职位:规控算法
期望城市:北京
期望薪资:8000-10000
求职状态:离职-随时到岗
[工作经历]
北京XX科技有限公司 | 规控算法
2024-09 - 2025-12
XXX智能是专注L2+自动驾驶解决方案的科技公司,团队规模约XXX人,核心业务是为物流、环卫等场景提供自动驾驶前装量产方案,产品已应用于超过XXX台车辆,与多家主机厂及运营商建立长期合作。
工作概述:
1.轨迹跟踪:负责实车轨迹跟踪算法开发,采用MPC方法设计控制器,调整权重参数提升跟踪精度,解决车辆响应延迟问题,在典型工况下将横向跟踪误差降低XXX%。
2.控制优化:针对低速泊车场景方向盘抖动问题,分析CAN信号延时与执行器特性,引入前馈补偿与低通滤波,优化转角控制指令平滑性,将泊车过程中方向盘异常抖动次数减少XXX%。
3.仿真测试:搭建规控算法仿真验证环境,使用Prescan或同类软件构建典型测试用例,通过批量回归测试验证算法修改效果,将单次算法迭代的验证周期缩短XXX%。
4.性能分析:处理实车路测数据,提取规控模块的关键指标如横向误差、舒适度,编写Python脚本进行自动化分析并生成报告,定位出XXX类典型场景下的算法短板。
5.算法部署:将优化后的C++算法模块集成至车规级计算平台,编写接口代码并完成模块级测试,支持完成XXX次实车功能联调。
6.文档撰写:维护算法设计文档、接口文档及测试报告,记录参数调整依据与测试结果,形成XXX份标准化文档模板供团队使用。
工作业绩:
1.完成泊车、跟车等核心场景的规控算法开发与优化,横向跟踪误差指标达到项目要求的XXX厘米以内。
2.通过控制优化将泊车场景下的乘坐舒适度主观评分提升XXX分,并获得测试团队认可。
3.搭建并维护包含XXX个典型场景的仿真测试用例集,助力算法问题早期发现率提升XXX%。
4.支持完成X个车型项目的规控算法交付与实车调试,保障项目按计划通过节点验收。
5.输出的算法分析报告与文档,被团队采纳为标准作业流程的一部分。
[项目经历]
项目名称:园区无人车规控系统升级
担任角色:项目负责人
公司为某物流园区提供的无人驾驶牵引车项目,原有规控系统在园区人车混行复杂路口存在决策犹豫、轨迹不平滑问题,导致通行效率低下,平均通过时间长达XXX秒,急刹频率高影响货物安全,需要升级规控算法以提升运行流畅度与效率。
项目业绩:
1.园区复杂路口通行效率提升XXX%,平均通过时间从XXX秒降至XXX秒。
2.车辆运行平顺性改善,急刹次数降低XXX%,货物安全性得到提升。
3.规控系统升级后,支持单车日均运行里程提升至XXX公里,满足园区扩大的运营需求。
4.项目成果获得客户验收通过,并作为标准方案推广至另外X个同类园区项目。
[教育背景]
南京理工大学
自动化 | 本科
GPA X.XX/X.X(专业前XX%),主修自动控制原理、现代控制理论、车辆动力学等核心课程,参与基于ROS的智能车循迹避障课程设计,在团队中负责运动规划与控制模块的代码实现,完成实车场地测试。熟练掌握C++/Python编程,熟悉ROS基础框架及常用工具。