
 职场资讯
职场资讯
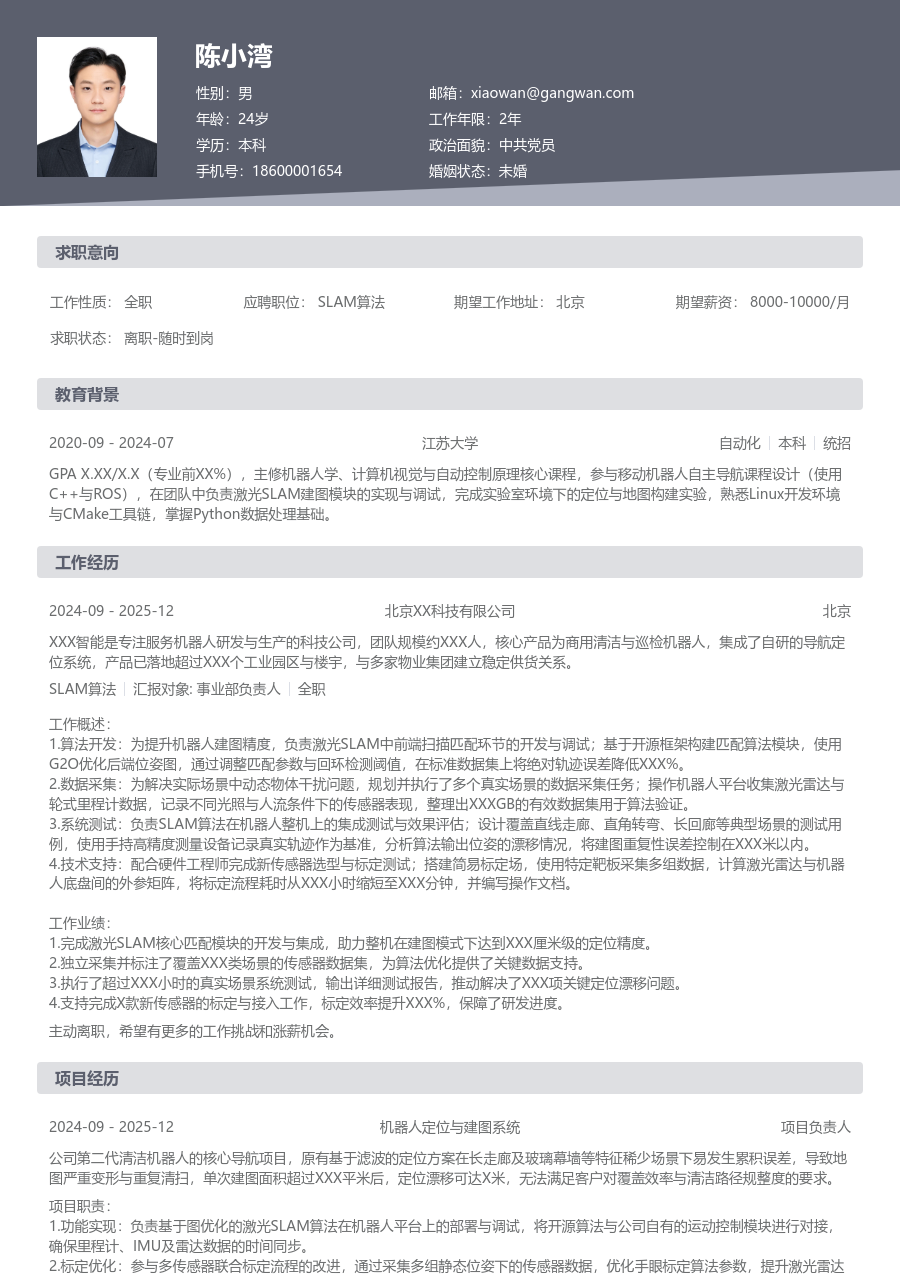
正在查看在校生SLAM算法简洁简历模板文字版
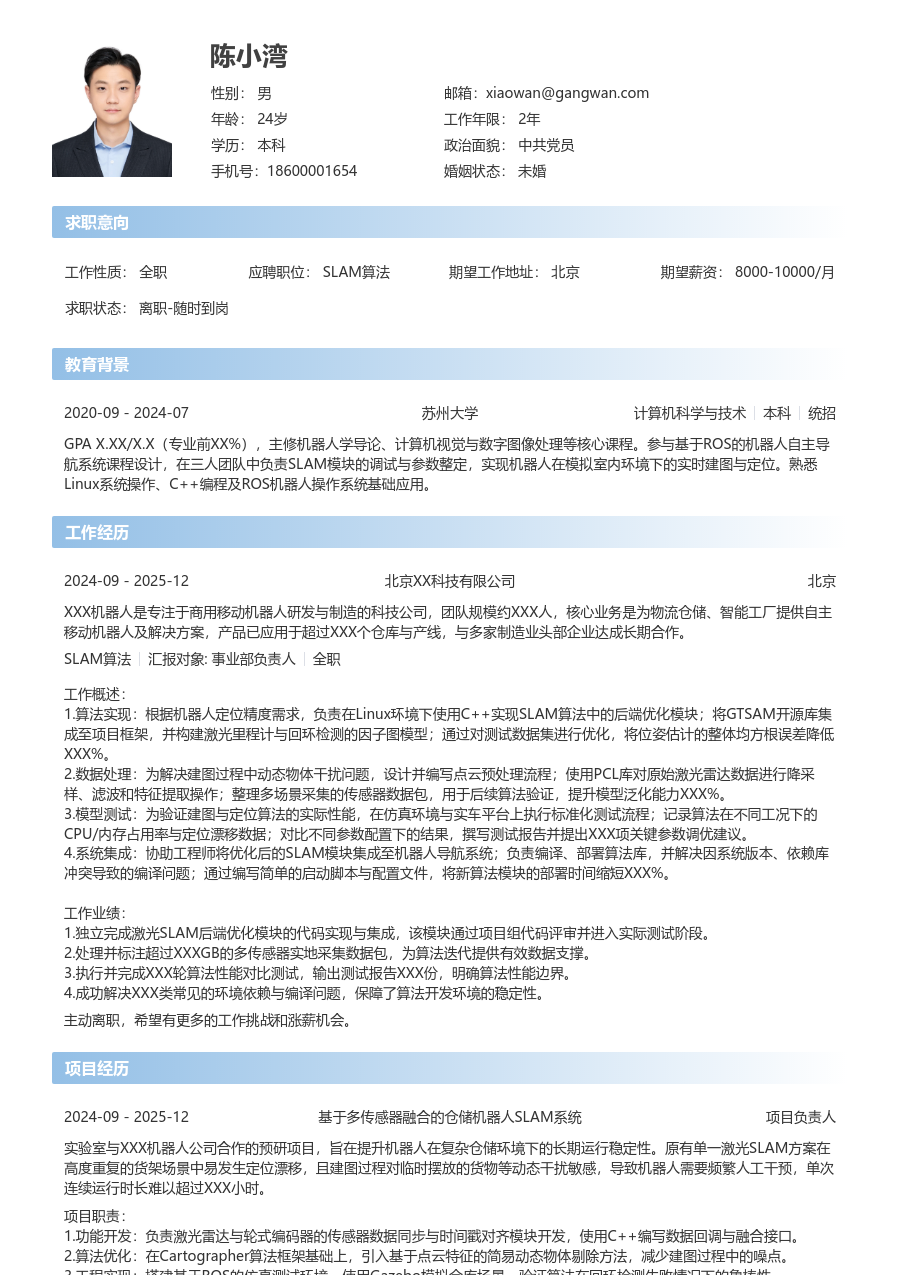
陈小湾
求职意向
工作经历
XXX机器人是专注于商用移动机器人研发与制造的科技公司,团队规模约XXX人,核心业务是为物流仓储、智能工厂提供自主移动机器人及解决方案,产品已应用于超过XXX个仓库与产线,与多家制造业头部企业达成长期合作。
工作概述:
1.算法实现:根据机器人定位精度需求,负责在Linux环境下使用C++实现SLAM算法中的后端优化模块;将GTSAM开源库集成至项目框架,并构建激光里程计与回环检测的因子图模型;通过对测试数据集进行优化,将位姿估计的整体均方根误差降低XXX%。
2.数据处理:为解决建图过程中动态物体干扰问题,设计并编写点云预处理流程;使用PCL库对原始激光雷达数据进行降采样、滤波和特征提取操作;整理多场景采集的传感器数据包,用于后续算法验证,提升模型泛化能力XXX%。
3.模型测试:为验证建图与定位算法的实际性能,在仿真环境与实车平台上执行标准化测试流程;记录算法在不同工况下的CPU/内存占用率与定位漂移数据;对比不同参数配置下的结果,撰写测试报告并提出XXX项关键参数调优建议。
4.系统集成:协助工程师将优化后的SLAM模块集成至机器人导航系统;负责编译、部署算法库,并解决因系统版本、依赖库冲突导致的编译问题;通过编写简单的启动脚本与配置文件,将新算法模块的部署时间缩短XXX%。
工作业绩:
1.独立完成激光SLAM后端优化模块的代码实现与集成,该模块通过项目组代码评审并进入实际测试阶段。
2.处理并标注超过XXXGB的多传感器实地采集数据包,为算法迭代提供有效数据支撑。
3.执行并完成XXX轮算法性能对比测试,输出测试报告XXX份,明确算法性能边界。
4.成功解决XXX类常见的环境依赖与编译问题,保障了算法开发环境的稳定性。
主动离职,希望有更多的工作挑战和涨薪机会。
项目经历
实验室与XXX机器人公司合作的预研项目,旨在提升机器人在复杂仓储环境下的长期运行稳定性。原有单一激光SLAM方案在高度重复的货架场景中易发生定位漂移,且建图过程对临时摆放的货物等动态干扰敏感,导致机器人需要频繁人工干预,单次连续运行时长难以超过XXX小时。
项目职责:
1.功能开发:负责激光雷达与轮式编码器的传感器数据同步与时间戳对齐模块开发,使用C++编写数据回调与融合接口。
2.算法优化:在Cartographer算法框架基础上,引入基于点云特征的简易动态物体剔除方法,减少建图过程中的噪点。
3.工程实现:搭建基于ROS的仿真测试环境,使用Gazebo模拟仓库场景,验证算法在回环检测失败情况下的鲁棒性。
4.质量保障:设计自动化测试脚本,批量运行不同场景的算法并记录定位误差、CPU占用等关键指标,对比优化前后数据。
项目业绩:
1.成功实现多传感器数据硬同步,将时间戳对齐误差控制在XXX毫秒以内。
2.优化后的建图算法在模拟动态干扰场景中,生成地图的可用性评分提升XXX%。
3.在标准测试数据集上,算法在长达XXX米的运行距离内,定位误差相对降低XXX%。
4.该项目成果形成技术报告,作为后续商用算法迭代的参考依据之一。
教育背景
GPA X.XX/X.X(专业前XX%),主修机器人学导论、计算机视觉与数字图像处理等核心课程。参与基于ROS的机器人自主导航系统课程设计,在三人团队中负责SLAM模块的调试与参数整定,实现机器人在模拟室内环境下的实时建图与定位。熟悉Linux系统操作、C++编程及ROS机器人操作系统基础应用。
自我评价
培训经历
系统学习了Kubernetes架构与管理,掌握容器化部署核心技能。在机器人集群仿真测试项目中,运用该技能部署和管理多个算法测试节点,实现测试任务的自动分发与结果收集,将多场景并行测试的准备时间减少了XXX%。
在校生SLAM算法简洁简历模板
适用人群: #SLAM算法 #在校生[找实习]
关于SLAM算法简历的常见问题
[基本信息]
姓名:陈小湾
性别:男
年龄:26
学历:本科
婚姻:未婚
年限:4年
面貌:党员
邮箱:xiaowan@gangwan.com
电话:18600001654
[求职意向]
工作性质:全职
应聘职位:SLAM算法
期望城市:北京
期望薪资:8000-10000
求职状态:离职-随时到岗
[工作经历]
北京XX科技有限公司 | SLAM算法
2024-09 - 2025-12
XXX机器人是专注于商用移动机器人研发与制造的科技公司,团队规模约XXX人,核心业务是为物流仓储、智能工厂提供自主移动机器人及解决方案,产品已应用于超过XXX个仓库与产线,与多家制造业头部企业达成长期合作。
工作概述:
1.算法实现:根据机器人定位精度需求,负责在Linux环境下使用C++实现SLAM算法中的后端优化模块;将GTSAM开源库集成至项目框架,并构建激光里程计与回环检测的因子图模型;通过对测试数据集进行优化,将位姿估计的整体均方根误差降低XXX%。
2.数据处理:为解决建图过程中动态物体干扰问题,设计并编写点云预处理流程;使用PCL库对原始激光雷达数据进行降采样、滤波和特征提取操作;整理多场景采集的传感器数据包,用于后续算法验证,提升模型泛化能力XXX%。
3.模型测试:为验证建图与定位算法的实际性能,在仿真环境与实车平台上执行标准化测试流程;记录算法在不同工况下的CPU/内存占用率与定位漂移数据;对比不同参数配置下的结果,撰写测试报告并提出XXX项关键参数调优建议。
4.系统集成:协助工程师将优化后的SLAM模块集成至机器人导航系统;负责编译、部署算法库,并解决因系统版本、依赖库冲突导致的编译问题;通过编写简单的启动脚本与配置文件,将新算法模块的部署时间缩短XXX%。
工作业绩:
1.独立完成激光SLAM后端优化模块的代码实现与集成,该模块通过项目组代码评审并进入实际测试阶段。
2.处理并标注超过XXXGB的多传感器实地采集数据包,为算法迭代提供有效数据支撑。
3.执行并完成XXX轮算法性能对比测试,输出测试报告XXX份,明确算法性能边界。
4.成功解决XXX类常见的环境依赖与编译问题,保障了算法开发环境的稳定性。
[项目经历]
项目名称:基于多传感器融合的仓储机器人SLAM系统
担任角色:项目负责人
实验室与XXX机器人公司合作的预研项目,旨在提升机器人在复杂仓储环境下的长期运行稳定性。原有单一激光SLAM方案在高度重复的货架场景中易发生定位漂移,且建图过程对临时摆放的货物等动态干扰敏感,导致机器人需要频繁人工干预,单次连续运行时长难以超过XXX小时。
项目业绩:
1.成功实现多传感器数据硬同步,将时间戳对齐误差控制在XXX毫秒以内。
2.优化后的建图算法在模拟动态干扰场景中,生成地图的可用性评分提升XXX%。
3.在标准测试数据集上,算法在长达XXX米的运行距离内,定位误差相对降低XXX%。
4.该项目成果形成技术报告,作为后续商用算法迭代的参考依据之一。
[教育背景]
苏州大学
计算机科学与技术 | 本科
GPA X.XX/X.X(专业前XX%),主修机器人学导论、计算机视觉与数字图像处理等核心课程。参与基于ROS的机器人自主导航系统课程设计,在三人团队中负责SLAM模块的调试与参数整定,实现机器人在模拟室内环境下的实时建图与定位。熟悉Linux系统操作、C++编程及ROS机器人操作系统基础应用。