
 职场资讯
职场资讯
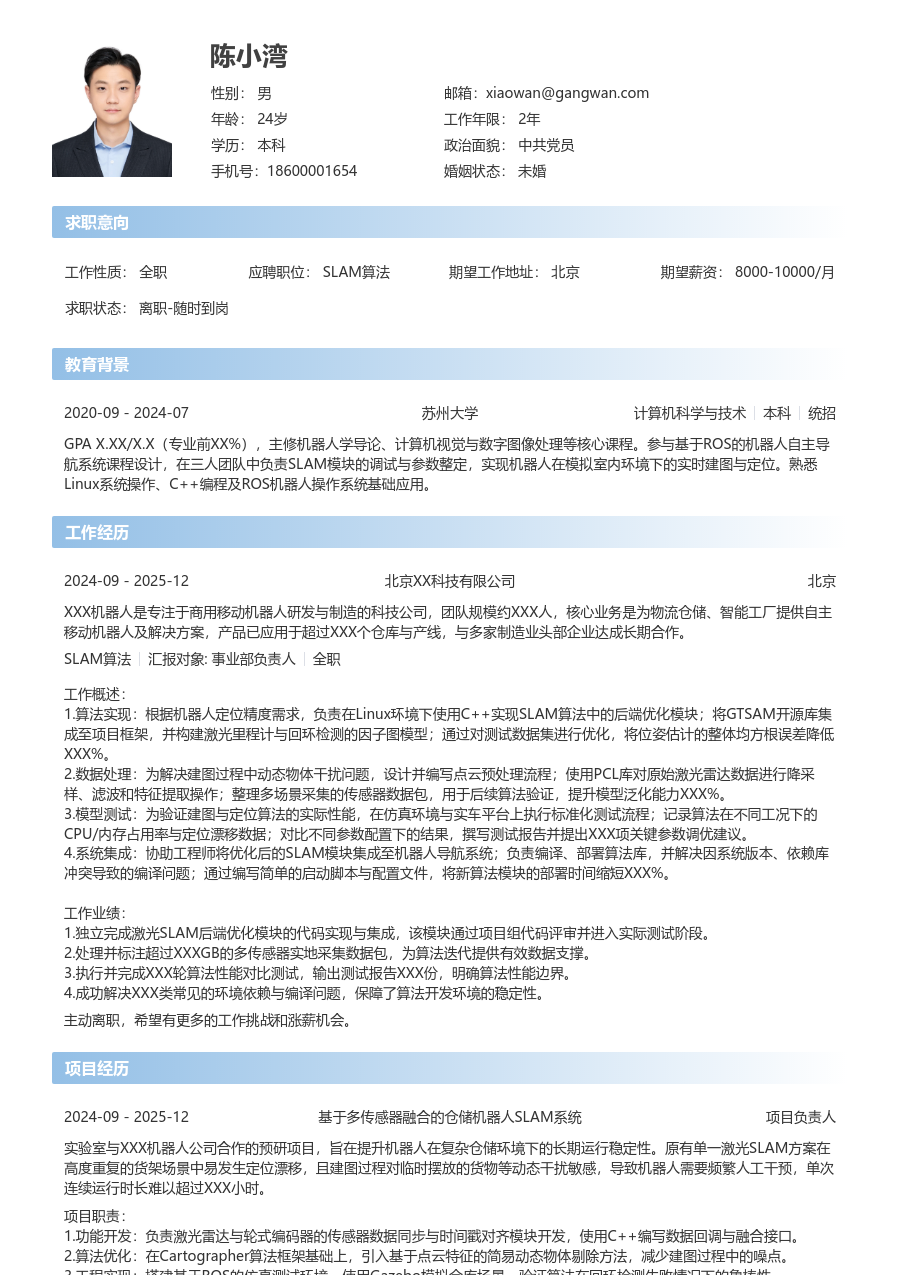
正在查看初级SLAM算法舒适简历模板文字版
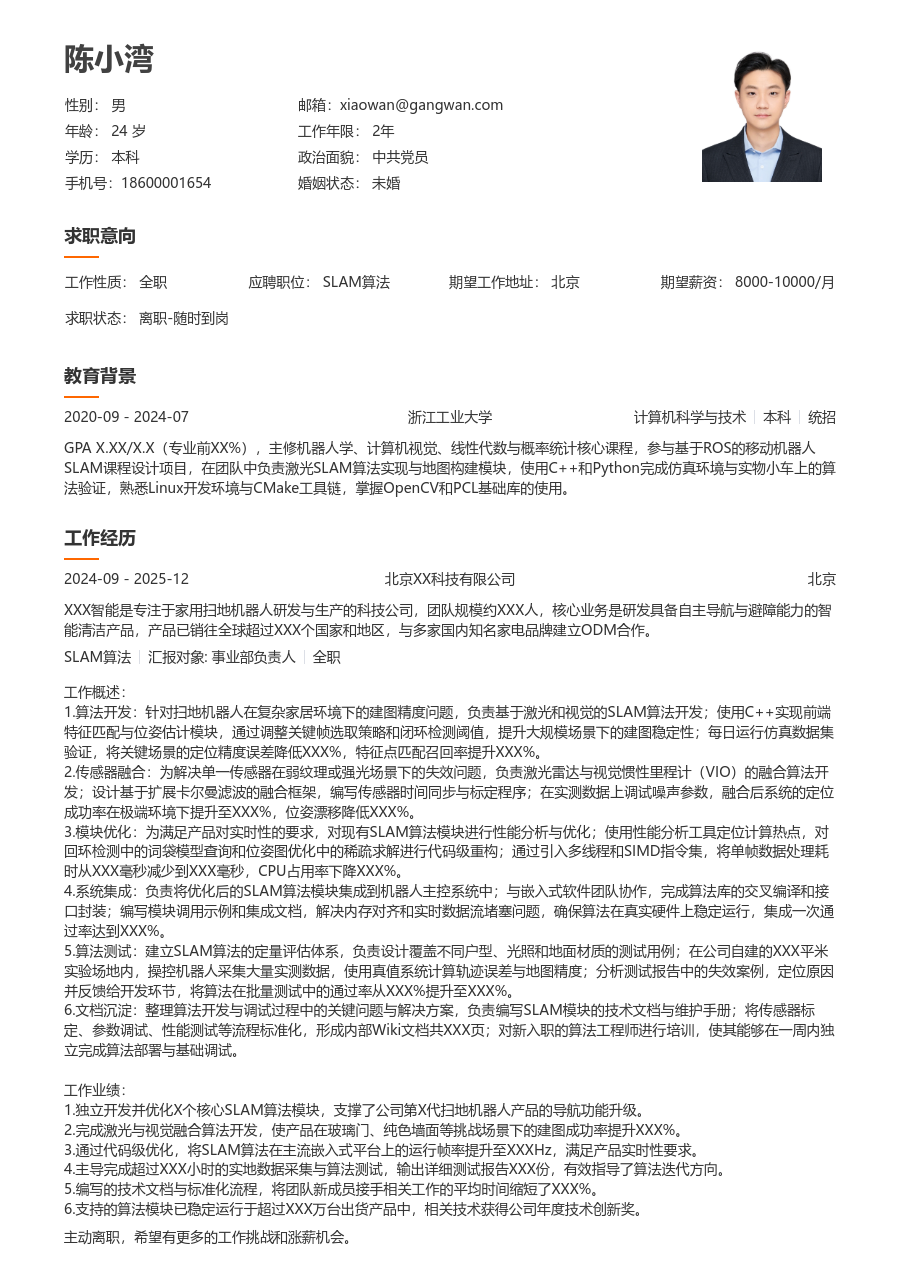
陈小湾
求职意向
工作经历
XXX智能是专注于家用扫地机器人研发与生产的科技公司,团队规模约XXX人,核心业务是研发具备自主导航与避障能力的智能清洁产品,产品已销往全球超过XXX个国家和地区,与多家国内知名家电品牌建立ODM合作。
工作概述:
1.算法开发:针对扫地机器人在复杂家居环境下的建图精度问题,负责基于激光和视觉的SLAM算法开发;使用C++实现前端特征匹配与位姿估计模块,通过调整关键帧选取策略和闭环检测阈值,提升大规模场景下的建图稳定性;每日运行仿真数据集验证,将关键场景的定位精度误差降低XXX%,特征点匹配召回率提升XXX%。
2.传感器融合:为解决单一传感器在弱纹理或强光场景下的失效问题,负责激光雷达与视觉惯性里程计(VIO)的融合算法开发;设计基于扩展卡尔曼滤波的融合框架,编写传感器时间同步与标定程序;在实测数据上调试噪声参数,融合后系统的定位成功率在极端环境下提升至XXX%,位姿漂移降低XXX%。
3.模块优化:为满足产品对实时性的要求,对现有SLAM算法模块进行性能分析与优化;使用性能分析工具定位计算热点,对回环检测中的词袋模型查询和位姿图优化中的稀疏求解进行代码级重构;通过引入多线程和SIMD指令集,将单帧数据处理耗时从XXX毫秒减少到XXX毫秒,CPU占用率下降XXX%。
4.系统集成:负责将优化后的SLAM算法模块集成到机器人主控系统中;与嵌入式软件团队协作,完成算法库的交叉编译和接口封装;编写模块调用示例和集成文档,解决内存对齐和实时数据流堵塞问题,确保算法在真实硬件上稳定运行,集成一次通过率达到XXX%。
5.算法测试:建立SLAM算法的定量评估体系,负责设计覆盖不同户型、光照和地面材质的测试用例;在公司自建的XXX平米实验场地内,操控机器人采集大量实测数据,使用真值系统计算轨迹误差与地图精度;分析测试报告中的失效案例,定位原因并反馈给开发环节,将算法在批量测试中的通过率从XXX%提升至XXX%。
6.文档沉淀:整理算法开发与调试过程中的关键问题与解决方案,负责编写SLAM模块的技术文档与维护手册;将传感器标定、参数调试、性能测试等流程标准化,形成内部Wiki文档共XXX页;对新入职的算法工程师进行培训,使其能够在一周内独立完成算法部署与基础调试。
工作业绩:
1.独立开发并优化X个核心SLAM算法模块,支撑了公司第X代扫地机器人产品的导航功能升级。
2.完成激光与视觉融合算法开发,使产品在玻璃门、纯色墙面等挑战场景下的建图成功率提升XXX%。
3.通过代码级优化,将SLAM算法在主流嵌入式平台上的运行帧率提升至XXXHz,满足产品实时性要求。
4.主导完成超过XXX小时的实地数据采集与算法测试,输出详细测试报告XXX份,有效指导了算法迭代方向。
5.编写的技术文档与标准化流程,将团队新成员接手相关工作的平均时间缩短了XXX%。
6.支持的算法模块已稳定运行于超过XXX万台出货产品中,相关技术获得公司年度技术创新奖。
主动离职,希望有更多的工作挑战和涨薪机会。
项目经历
公司核心扫地机器人产品的导航算法换代项目,原有基于单一激光雷达的SLAM系统在复杂家具环境、低矮障碍物下存在地图扭曲和定位丢失问题,无法满足新产品对更高清洁覆盖率和越障能力的需求。项目目标是为下一代旗舰机型开发一套更鲁棒、更精确的多传感器融合导航方案,以应对全球不同用户家庭的多样化场景,并需将整体算法包的大小控制在XXX MB以内以适配现有硬件成本。
项目职责:
1.负责新版视觉惯性里程计(VIO)模块的开发与调试,采用点线特征结合的策略提升在弱纹理区域(如白墙)的跟踪稳定性,通过优化IMU预积分和视觉重投影误差模型,将VIO在剧烈运动下的位姿估计误差降低XXX%。
2.设计并实现激光雷达点云与VIO位姿的松耦合融合方案,开发基于图优化的联合优化模块,利用激光的高精度测距信息修正VIO的累积漂移,使百米级路径的闭合误差达到XXX米以内。
3.主导回环检测模块的算法选型与改进,引入深度学习的全局描述子替代传统词袋模型,提升场景识别召回率;优化位姿图的后端优化速度,将大规模地图(超过XXX个关键帧)的全局优化时间缩短XXX%。
4.建立完整的算法实测验证流程,包括设计自动化数据采集脚本、搭建离线评估工具链,并协调测试团队在XXX个典型用户家庭中进行长达XXX周的盲测,根据反馈数据迭代算法参数XXX个版本。
项目业绩:
1.成功交付新一代多传感器融合SLAM系统,在新产品上实现XXX%的清洁覆盖率提升和XXX%的重复清扫率降低。
2.算法在内部标准测试集的定位精度达到XXX米,地图一致性评分超过XXX分,关键指标超过竞品XXX%。
3.算法包体积控制在XXX MB以内,无需硬件升级即完成部署,节约单机硬件成本约XXX元。
4.项目成果直接应用于公司年度旗舰机型,助力该产品上市后首季度销量突破XXX万台,获得市场好评。
教育背景
GPA X.XX/X.X(专业前XX%),主修机器人学、计算机视觉、线性代数与概率统计核心课程,参与基于ROS的移动机器人SLAM课程设计项目,在团队中负责激光SLAM算法实现与地图构建模块,使用C++和Python完成仿真环境与实物小车上的算法验证,熟悉Linux开发环境与CMake工具链,掌握OpenCV和PCL基础库的使用。
自我评价
培训经历
系统学习了机器人操作系统(ROS)的核心概念与高级功能,将所学应用于公司实际机器人项目的算法开发框架搭建。通过使用ROS的节点通信、TF坐标变换、可视化工具(Rviz)和仿真环境(Gazebo),建立了标准的SLAM算法开发与测试流程,统一了团队内部的代码规范,使得算法仿真验证的效率提升了约XXX%。
初级SLAM算法舒适简历模板
适用人群: #SLAM算法 #初级[1-3年]
关于SLAM算法简历的常见问题
[基本信息]
姓名:陈小湾
性别:男
年龄:26
学历:本科
婚姻:未婚
年限:4年
面貌:党员
邮箱:xiaowan@gangwan.com
电话:18600001654
[求职意向]
工作性质:全职
应聘职位:SLAM算法
期望城市:北京
期望薪资:8000-10000
求职状态:离职-随时到岗
[工作经历]
北京XX科技有限公司 | SLAM算法
2024-09 - 2025-12
XXX智能是专注于家用扫地机器人研发与生产的科技公司,团队规模约XXX人,核心业务是研发具备自主导航与避障能力的智能清洁产品,产品已销往全球超过XXX个国家和地区,与多家国内知名家电品牌建立ODM合作。
工作概述:
1.算法开发:针对扫地机器人在复杂家居环境下的建图精度问题,负责基于激光和视觉的SLAM算法开发;使用C++实现前端特征匹配与位姿估计模块,通过调整关键帧选取策略和闭环检测阈值,提升大规模场景下的建图稳定性;每日运行仿真数据集验证,将关键场景的定位精度误差降低XXX%,特征点匹配召回率提升XXX%。
2.传感器融合:为解决单一传感器在弱纹理或强光场景下的失效问题,负责激光雷达与视觉惯性里程计(VIO)的融合算法开发;设计基于扩展卡尔曼滤波的融合框架,编写传感器时间同步与标定程序;在实测数据上调试噪声参数,融合后系统的定位成功率在极端环境下提升至XXX%,位姿漂移降低XXX%。
3.模块优化:为满足产品对实时性的要求,对现有SLAM算法模块进行性能分析与优化;使用性能分析工具定位计算热点,对回环检测中的词袋模型查询和位姿图优化中的稀疏求解进行代码级重构;通过引入多线程和SIMD指令集,将单帧数据处理耗时从XXX毫秒减少到XXX毫秒,CPU占用率下降XXX%。
4.系统集成:负责将优化后的SLAM算法模块集成到机器人主控系统中;与嵌入式软件团队协作,完成算法库的交叉编译和接口封装;编写模块调用示例和集成文档,解决内存对齐和实时数据流堵塞问题,确保算法在真实硬件上稳定运行,集成一次通过率达到XXX%。
5.算法测试:建立SLAM算法的定量评估体系,负责设计覆盖不同户型、光照和地面材质的测试用例;在公司自建的XXX平米实验场地内,操控机器人采集大量实测数据,使用真值系统计算轨迹误差与地图精度;分析测试报告中的失效案例,定位原因并反馈给开发环节,将算法在批量测试中的通过率从XXX%提升至XXX%。
6.文档沉淀:整理算法开发与调试过程中的关键问题与解决方案,负责编写SLAM模块的技术文档与维护手册;将传感器标定、参数调试、性能测试等流程标准化,形成内部Wiki文档共XXX页;对新入职的算法工程师进行培训,使其能够在一周内独立完成算法部署与基础调试。
工作业绩:
1.独立开发并优化X个核心SLAM算法模块,支撑了公司第X代扫地机器人产品的导航功能升级。
2.完成激光与视觉融合算法开发,使产品在玻璃门、纯色墙面等挑战场景下的建图成功率提升XXX%。
3.通过代码级优化,将SLAM算法在主流嵌入式平台上的运行帧率提升至XXXHz,满足产品实时性要求。
4.主导完成超过XXX小时的实地数据采集与算法测试,输出详细测试报告XXX份,有效指导了算法迭代方向。
5.编写的技术文档与标准化流程,将团队新成员接手相关工作的平均时间缩短了XXX%。
6.支持的算法模块已稳定运行于超过XXX万台出货产品中,相关技术获得公司年度技术创新奖。
[项目经历]
项目名称:扫地机器人导航与建图系统升级
担任角色:项目负责人
公司核心扫地机器人产品的导航算法换代项目,原有基于单一激光雷达的SLAM系统在复杂家具环境、低矮障碍物下存在地图扭曲和定位丢失问题,无法满足新产品对更高清洁覆盖率和越障能力的需求。项目目标是为下一代旗舰机型开发一套更鲁棒、更精确的多传感器融合导航方案,以应对全球不同用户家庭的多样化场景,并需将整体算法包的大小控制在XXX MB以内以适配现有硬件成本。
项目业绩:
1.成功交付新一代多传感器融合SLAM系统,在新产品上实现XXX%的清洁覆盖率提升和XXX%的重复清扫率降低。
2.算法在内部标准测试集的定位精度达到XXX米,地图一致性评分超过XXX分,关键指标超过竞品XXX%。
3.算法包体积控制在XXX MB以内,无需硬件升级即完成部署,节约单机硬件成本约XXX元。
4.项目成果直接应用于公司年度旗舰机型,助力该产品上市后首季度销量突破XXX万台,获得市场好评。
[教育背景]
浙江工业大学
计算机科学与技术 | 本科
GPA X.XX/X.X(专业前XX%),主修机器人学、计算机视觉、线性代数与概率统计核心课程,参与基于ROS的移动机器人SLAM课程设计项目,在团队中负责激光SLAM算法实现与地图构建模块,使用C++和Python完成仿真环境与实物小车上的算法验证,熟悉Linux开发环境与CMake工具链,掌握OpenCV和PCL基础库的使用。