
 职场资讯
职场资讯
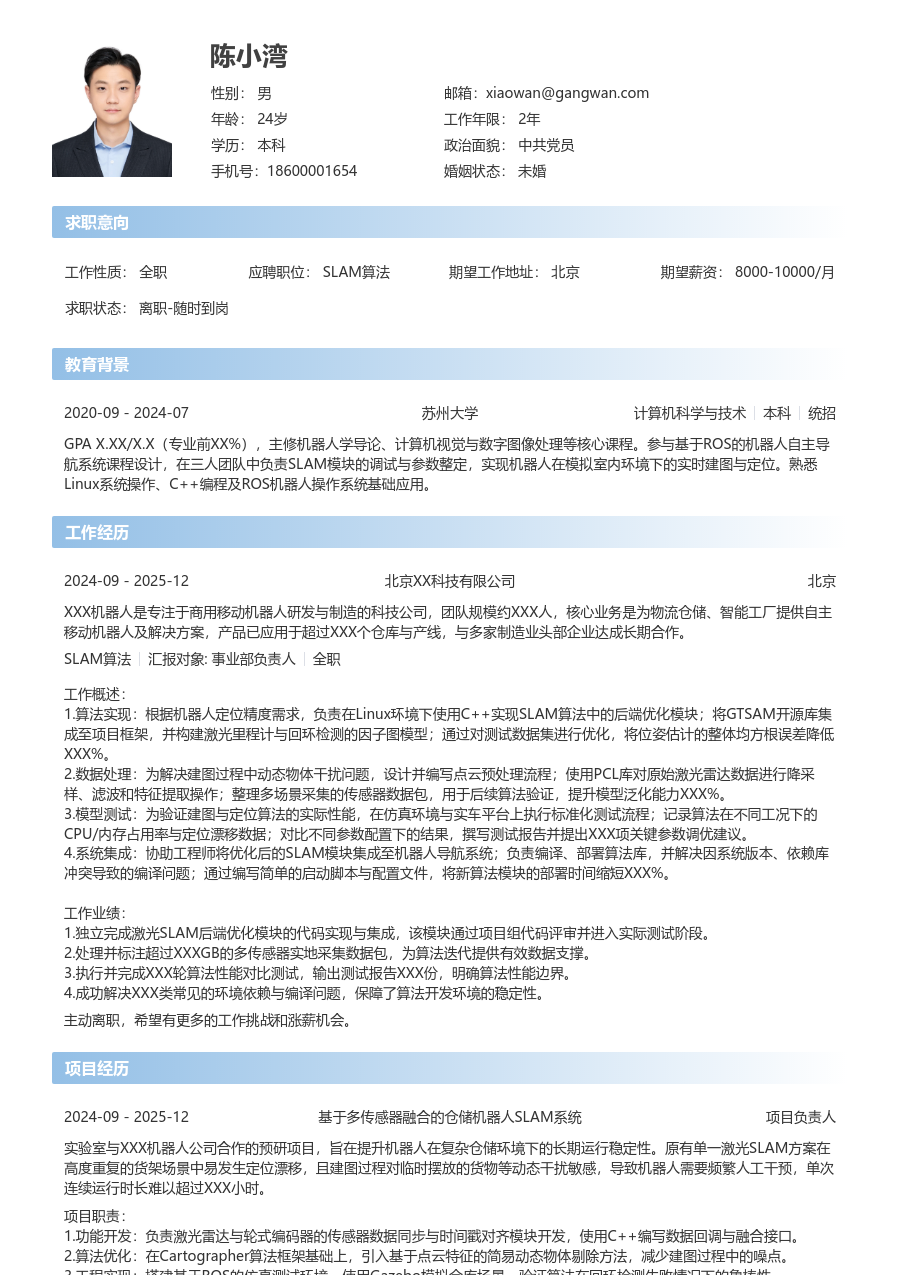
正在查看资深SLAM算法简洁简历模板文字版
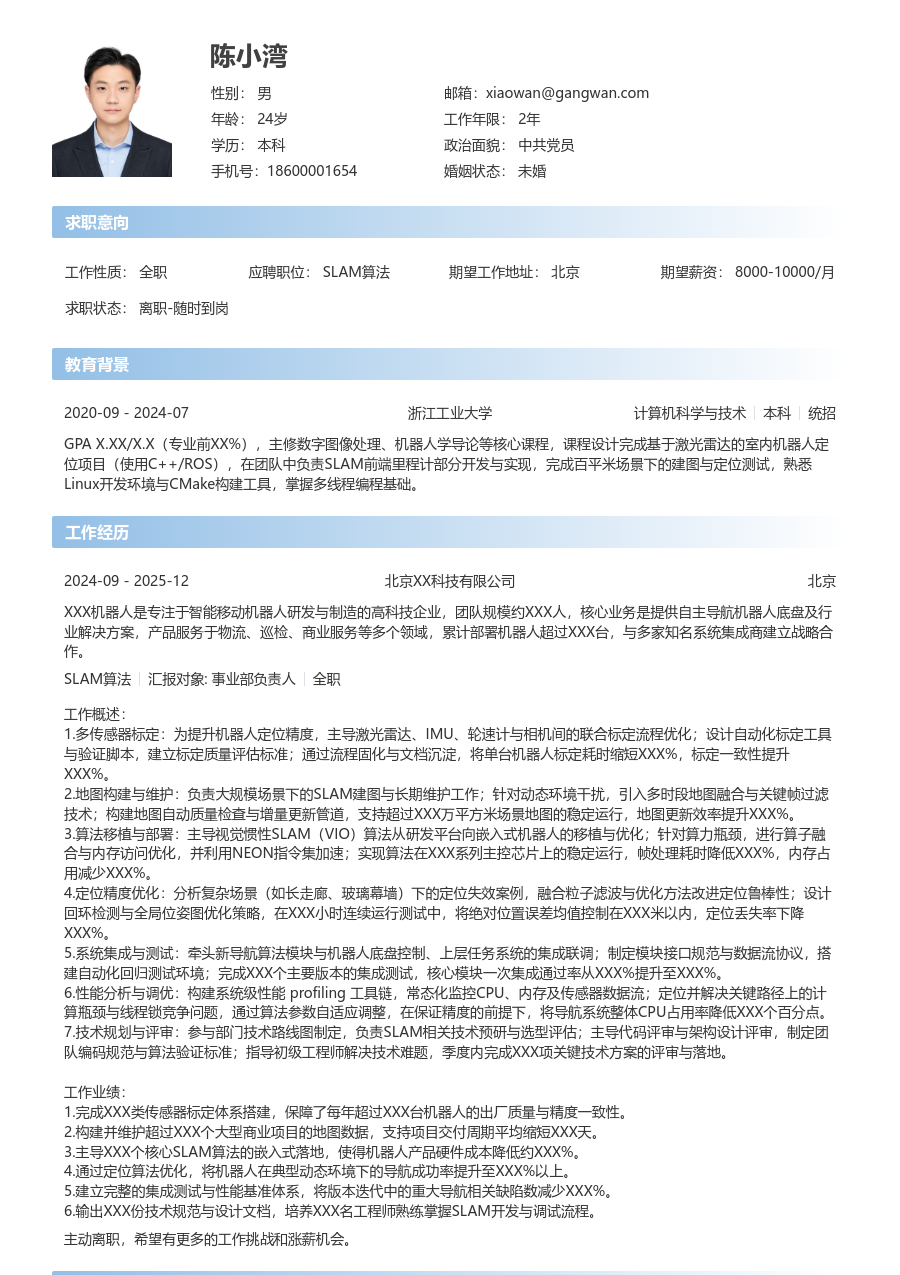
陈小湾
求职意向
工作经历
XXX机器人是专注于智能移动机器人研发与制造的高科技企业,团队规模约XXX人,核心业务是提供自主导航机器人底盘及行业解决方案,产品服务于物流、巡检、商业服务等多个领域,累计部署机器人超过XXX台,与多家知名系统集成商建立战略合作。
工作概述:
1.多传感器标定:为提升机器人定位精度,主导激光雷达、IMU、轮速计与相机间的联合标定流程优化;设计自动化标定工具与验证脚本,建立标定质量评估标准;通过流程固化与文档沉淀,将单台机器人标定耗时缩短XXX%,标定一致性提升XXX%。
2.地图构建与维护:负责大规模场景下的SLAM建图与长期维护工作;针对动态环境干扰,引入多时段地图融合与关键帧过滤技术;构建地图自动质量检查与增量更新管道,支持超过XXX万平方米场景地图的稳定运行,地图更新效率提升XXX%。
3.算法移植与部署:主导视觉惯性SLAM(VIO)算法从研发平台向嵌入式机器人的移植与优化;针对算力瓶颈,进行算子融合与内存访问优化,并利用NEON指令集加速;实现算法在XXX系列主控芯片上的稳定运行,帧处理耗时降低XXX%,内存占用减少XXX%。
4.定位精度优化:分析复杂场景(如长走廊、玻璃幕墙)下的定位失效案例,融合粒子滤波与优化方法改进定位鲁棒性;设计回环检测与全局位姿图优化策略,在XXX小时连续运行测试中,将绝对位置误差均值控制在XXX米以内,定位丢失率下降XXX%。
5.系统集成与测试:牵头新导航算法模块与机器人底盘控制、上层任务系统的集成联调;制定模块接口规范与数据流协议,搭建自动化回归测试环境;完成XXX个主要版本的集成测试,核心模块一次集成通过率从XXX%提升至XXX%。
6.性能分析与调优:构建系统级性能 profiling 工具链,常态化监控CPU、内存及传感器数据流;定位并解决关键路径上的计算瓶颈与线程锁竞争问题,通过算法参数自适应调整,在保证精度的前提下,将导航系统整体CPU占用率降低XXX个百分点。
7.技术规划与评审:参与部门技术路线图制定,负责SLAM相关技术预研与选型评估;主导代码评审与架构设计评审,制定团队编码规范与算法验证标准;指导初级工程师解决技术难题,季度内完成XXX项关键技术方案的评审与落地。
工作业绩:
1.完成XXX类传感器标定体系搭建,保障了每年超过XXX台机器人的出厂质量与精度一致性。
2.构建并维护超过XXX个大型商业项目的地图数据,支持项目交付周期平均缩短XXX天。
3.主导XXX个核心SLAM算法的嵌入式落地,使得机器人产品硬件成本降低约XXX%。
4.通过定位算法优化,将机器人在典型动态环境下的导航成功率提升至XXX%以上。
5.建立完整的集成测试与性能基准体系,将版本迭代中的重大导航相关缺陷数减少XXX%。
6.输出XXX份技术规范与设计文档,培养XXX名工程师熟练掌握SLAM开发与调试流程。
主动离职,希望有更多的工作挑战和涨薪机会。
项目经历
公司主力仓储搬运机器人产品的核心导航系统升级项目,原有基于单一激光雷达的导航方案在货架密集、人机混场环境下存在定位漂移、通行效率低下问题,高峰期单机任务失败率高达X%,无法满足客户仓库XXX小时连续作业的需求。新方案需融合多线激光与视觉传感器,在保证XXX毫米级重复定位精度的前提下,将动态避障响应速度提升X倍,并适应超过XXX种差异化的仓库布局。
项目职责:
1.算法选型与设计:负责多传感器融合SLAM算法方案选型与核心架构设计,确定以图优化为主框架,融合激光里程计、视觉特征与IMU预积分的技术路线。
2.核心模块开发:主导前端里程计与后端位姿图优化模块的开发,实现传感器数据的时间同步与空间对准,并开发鲁棒的回环检测模块。
3.性能优化与调试:针对实时性要求,对优化问题的求解器与稀疏矩阵运算进行针对性优化,将后端优化单次计算时间从XXX毫秒降至XXX毫秒。
4.系统集成与测试:将新算法模块集成至机器人操作系统,并与运动控制、任务调度模块联调,主导在仿真环境与XXX个真实客户仓库的实地测试验证。
项目业绩:
1.新导航系统在典型仓库环境下的绝对定位精度达到XXX毫米,满足客户高精度堆垛需求。
2.机器人动态避障响应时间缩短至XXX秒,在混场作业中的任务失败率从X%降至X%。
3.系统支持单仓XXX台机器人同时高效运行,整体仓储运营效率提升XXX%。
4.项目成果成功应用于XXX家重点客户,带动机器人单品销售额增长约XXX%。
教育背景
GPA X.XX/X.X(专业前XX%),主修数字图像处理、机器人学导论等核心课程,课程设计完成基于激光雷达的室内机器人定位项目(使用C++/ROS),在团队中负责SLAM前端里程计部分开发与实现,完成百平米场景下的建图与定位测试,熟悉Linux开发环境与CMake构建工具,掌握多线程编程基础。
自我评价
培训经历
系统学习了ROS2架构设计与高级编程技巧,并将分布式通信、生命周期管理等最佳实践应用于新一代机器人导航框架中,通过重构节点通信与数据管理逻辑,将导航系统各模块间通信延迟降低XXX%,框架稳定性显著提升,相关设计模式在团队内部推广。
资深SLAM算法简洁简历模板
适用人群: #SLAM算法 #资深[10+年]
关于SLAM算法简历的常见问题
[基本信息]
姓名:陈小湾
性别:男
年龄:26
学历:本科
婚姻:未婚
年限:4年
面貌:党员
邮箱:xiaowan@gangwan.com
电话:18600001654
[求职意向]
工作性质:全职
应聘职位:SLAM算法
期望城市:北京
期望薪资:8000-10000
求职状态:离职-随时到岗
[工作经历]
北京XX科技有限公司 | SLAM算法
2024-09 - 2025-12
XXX机器人是专注于智能移动机器人研发与制造的高科技企业,团队规模约XXX人,核心业务是提供自主导航机器人底盘及行业解决方案,产品服务于物流、巡检、商业服务等多个领域,累计部署机器人超过XXX台,与多家知名系统集成商建立战略合作。
工作概述:
1.多传感器标定:为提升机器人定位精度,主导激光雷达、IMU、轮速计与相机间的联合标定流程优化;设计自动化标定工具与验证脚本,建立标定质量评估标准;通过流程固化与文档沉淀,将单台机器人标定耗时缩短XXX%,标定一致性提升XXX%。
2.地图构建与维护:负责大规模场景下的SLAM建图与长期维护工作;针对动态环境干扰,引入多时段地图融合与关键帧过滤技术;构建地图自动质量检查与增量更新管道,支持超过XXX万平方米场景地图的稳定运行,地图更新效率提升XXX%。
3.算法移植与部署:主导视觉惯性SLAM(VIO)算法从研发平台向嵌入式机器人的移植与优化;针对算力瓶颈,进行算子融合与内存访问优化,并利用NEON指令集加速;实现算法在XXX系列主控芯片上的稳定运行,帧处理耗时降低XXX%,内存占用减少XXX%。
4.定位精度优化:分析复杂场景(如长走廊、玻璃幕墙)下的定位失效案例,融合粒子滤波与优化方法改进定位鲁棒性;设计回环检测与全局位姿图优化策略,在XXX小时连续运行测试中,将绝对位置误差均值控制在XXX米以内,定位丢失率下降XXX%。
5.系统集成与测试:牵头新导航算法模块与机器人底盘控制、上层任务系统的集成联调;制定模块接口规范与数据流协议,搭建自动化回归测试环境;完成XXX个主要版本的集成测试,核心模块一次集成通过率从XXX%提升至XXX%。
6.性能分析与调优:构建系统级性能 profiling 工具链,常态化监控CPU、内存及传感器数据流;定位并解决关键路径上的计算瓶颈与线程锁竞争问题,通过算法参数自适应调整,在保证精度的前提下,将导航系统整体CPU占用率降低XXX个百分点。
7.技术规划与评审:参与部门技术路线图制定,负责SLAM相关技术预研与选型评估;主导代码评审与架构设计评审,制定团队编码规范与算法验证标准;指导初级工程师解决技术难题,季度内完成XXX项关键技术方案的评审与落地。
工作业绩:
1.完成XXX类传感器标定体系搭建,保障了每年超过XXX台机器人的出厂质量与精度一致性。
2.构建并维护超过XXX个大型商业项目的地图数据,支持项目交付周期平均缩短XXX天。
3.主导XXX个核心SLAM算法的嵌入式落地,使得机器人产品硬件成本降低约XXX%。
4.通过定位算法优化,将机器人在典型动态环境下的导航成功率提升至XXX%以上。
5.建立完整的集成测试与性能基准体系,将版本迭代中的重大导航相关缺陷数减少XXX%。
6.输出XXX份技术规范与设计文档,培养XXX名工程师熟练掌握SLAM开发与调试流程。
[项目经历]
项目名称:智能仓储机器人导航系统升级
担任角色:项目负责人
公司主力仓储搬运机器人产品的核心导航系统升级项目,原有基于单一激光雷达的导航方案在货架密集、人机混场环境下存在定位漂移、通行效率低下问题,高峰期单机任务失败率高达X%,无法满足客户仓库XXX小时连续作业的需求。新方案需融合多线激光与视觉传感器,在保证XXX毫米级重复定位精度的前提下,将动态避障响应速度提升X倍,并适应超过XXX种差异化的仓库布局。
项目业绩:
1.新导航系统在典型仓库环境下的绝对定位精度达到XXX毫米,满足客户高精度堆垛需求。
2.机器人动态避障响应时间缩短至XXX秒,在混场作业中的任务失败率从X%降至X%。
3.系统支持单仓XXX台机器人同时高效运行,整体仓储运营效率提升XXX%。
4.项目成果成功应用于XXX家重点客户,带动机器人单品销售额增长约XXX%。
[教育背景]
浙江工业大学
计算机科学与技术 | 本科
GPA X.XX/X.X(专业前XX%),主修数字图像处理、机器人学导论等核心课程,课程设计完成基于激光雷达的室内机器人定位项目(使用C++/ROS),在团队中负责SLAM前端里程计部分开发与实现,完成百平米场景下的建图与定位测试,熟悉Linux开发环境与CMake构建工具,掌握多线程编程基础。