
 职场资讯
职场资讯
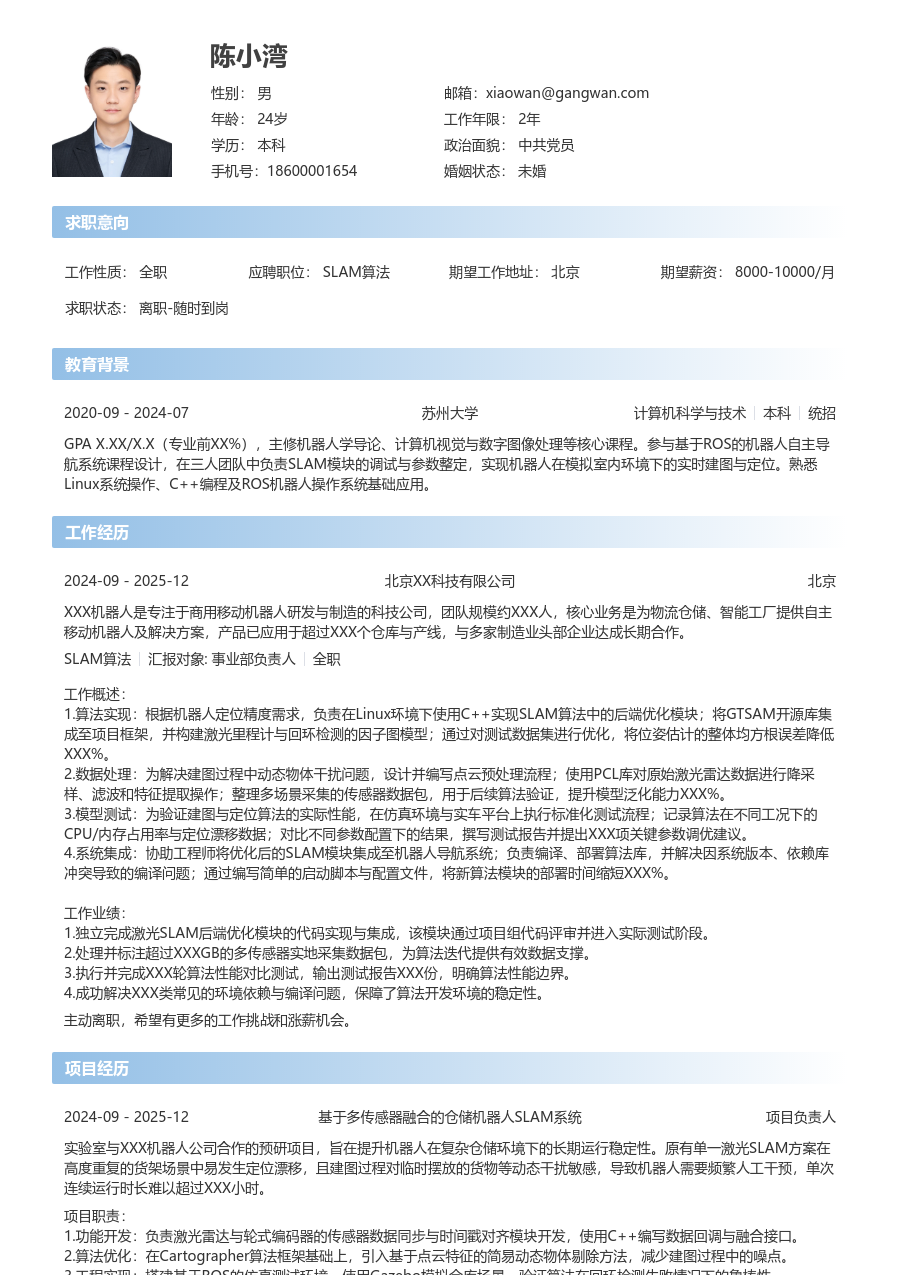
正在查看中级SLAM算法清晰简历模板文字版
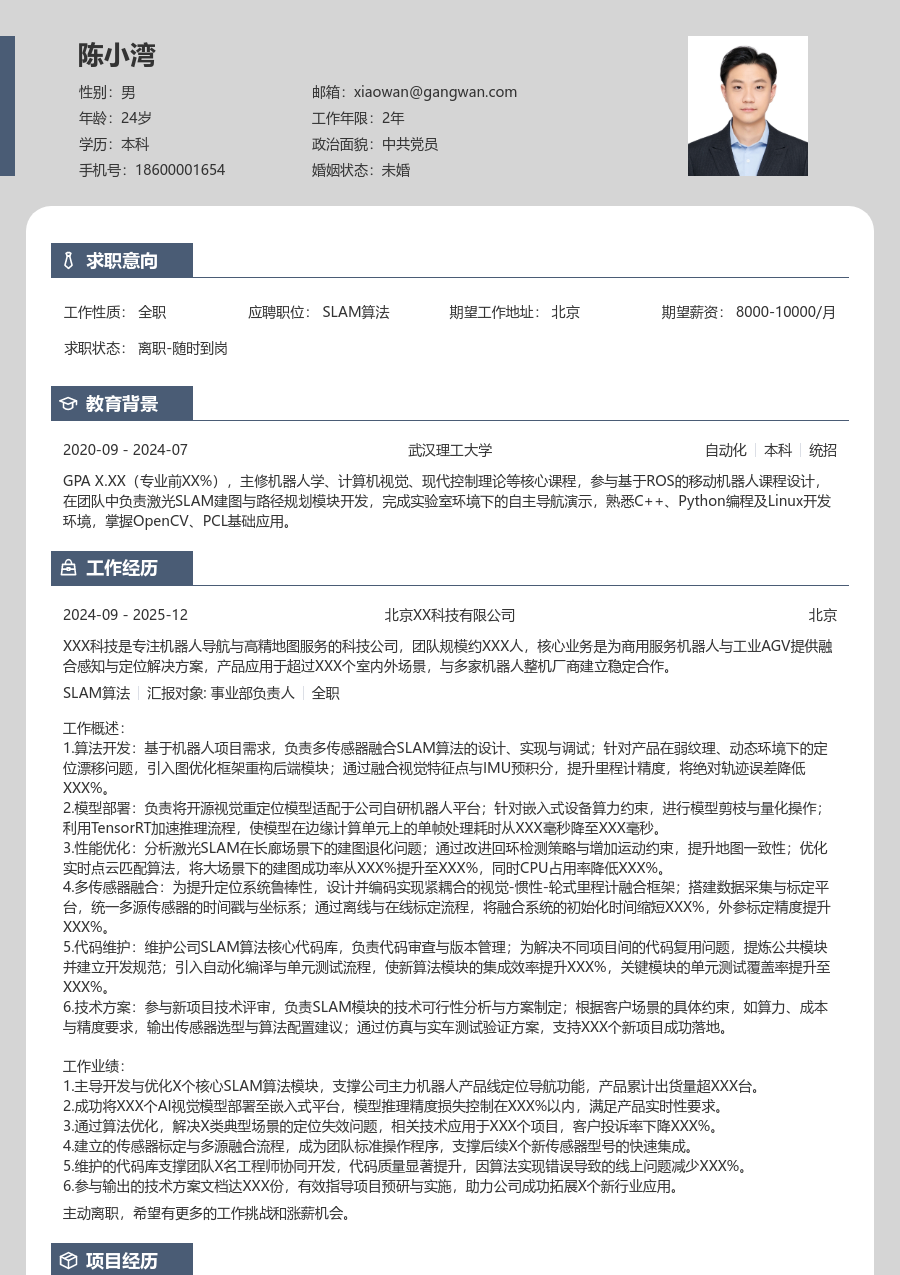
陈小湾
求职意向
工作经历
XXX科技是专注机器人导航与高精地图服务的科技公司,团队规模约XXX人,核心业务是为商用服务机器人与工业AGV提供融合感知与定位解决方案,产品应用于超过XXX个室内外场景,与多家机器人整机厂商建立稳定合作。
工作概述:
1.算法开发:基于机器人项目需求,负责多传感器融合SLAM算法的设计、实现与调试;针对产品在弱纹理、动态环境下的定位漂移问题,引入图优化框架重构后端模块;通过融合视觉特征点与IMU预积分,提升里程计精度,将绝对轨迹误差降低XXX%。
2.模型部署:负责将开源视觉重定位模型适配于公司自研机器人平台;针对嵌入式设备算力约束,进行模型剪枝与量化操作;利用TensorRT加速推理流程,使模型在边缘计算单元上的单帧处理耗时从XXX毫秒降至XXX毫秒。
3.性能优化:分析激光SLAM在长廊场景下的建图退化问题;通过改进回环检测策略与增加运动约束,提升地图一致性;优化实时点云匹配算法,将大场景下的建图成功率从XXX%提升至XXX%,同时CPU占用率降低XXX%。
4.多传感器融合:为提升定位系统鲁棒性,设计并编码实现紧耦合的视觉-惯性-轮式里程计融合框架;搭建数据采集与标定平台,统一多源传感器的时间戳与坐标系;通过离线与在线标定流程,将融合系统的初始化时间缩短XXX%,外参标定精度提升XXX%。
5.代码维护:维护公司SLAM算法核心代码库,负责代码审查与版本管理;为解决不同项目间的代码复用问题,提炼公共模块并建立开发规范;引入自动化编译与单元测试流程,使新算法模块的集成效率提升XXX%,关键模块的单元测试覆盖率提升至XXX%。
6.技术方案:参与新项目技术评审,负责SLAM模块的技术可行性分析与方案制定;根据客户场景的具体约束,如算力、成本与精度要求,输出传感器选型与算法配置建议;通过仿真与实车测试验证方案,支持XXX个新项目成功落地。
工作业绩:
1.主导开发与优化X个核心SLAM算法模块,支撑公司主力机器人产品线定位导航功能,产品累计出货量超XXX台。
2.成功将XXX个AI视觉模型部署至嵌入式平台,模型推理精度损失控制在XXX%以内,满足产品实时性要求。
3.通过算法优化,解决X类典型场景的定位失效问题,相关技术应用于XXX个项目,客户投诉率下降XXX%。
4.建立的传感器标定与多源融合流程,成为团队标准操作程序,支撑后续X个新传感器型号的快速集成。
5.维护的代码库支撑团队X名工程师协同开发,代码质量显著提升,因算法实现错误导致的线上问题减少XXX%。
6.参与输出的技术方案文档达XXX份,有效指导项目预研与实施,助力公司成功拓展X个新行业应用。
主动离职,希望有更多的工作挑战和涨薪机会。
项目经历
为解决公司仓储搬运AGV在货架密集、光照变化环境下的长期运行累计误差与初始化不便问题而启动的项目,原有纯激光方案在长走廊环境下易退化,且需预先铺设反射板,实施成本高、柔性差。项目目标是在无辅助标识的复杂室内场景下,实现厘米级定位精度与鲁棒的重定位能力,以支撑XXX台AGV的7x24小时混合调度作业。
项目职责:
1.负责开发紧耦合的VIO前端,实现图像与IMU数据的实时同步与状态预估,采用多状态约束卡尔曼滤波框架,处理高速运动下的图像模糊问题。
2.设计并实现基于视觉词袋与点线特征的全局重定位模块,优化特征匹配与几何验证流程,使其在视角变化与部分遮挡情况下仍能稳定工作。
3.主导后端优化与地图管理,构建包含视觉路标点与IMU约束的位姿图,采用增量式平滑与建图技术,实现轻量级长期地图的存储与在线更新。
4.负责算法在车载工控机上的工程化集成与性能调优,包括内存管理、线程调度与ROS节点通讯优化,确保系统资源占用符合项目要求。
项目业绩:
1.在XXX平米实景仓库中测试,系统绝对定位误差稳定在XXX厘米以内,满足项目精度指标,重定位成功率达XXX%。
2.相较于原有激光反射板方案,为新客户节省单项目实施成本约XXX%,部署周期缩短XXX%。
3.系统在目标AGV平台(CPU为i7-XXX,无独立GPU)上稳定运行,定位线程CPU峰值占用率低于XXX%,支持同时调度XXX台AGV。
4.该项目成果成为公司新一代导航系统标准配置,已成功应用于X家客户的智慧仓库项目,并获得客户验收好评。
教育背景
GPA X.XX(专业前XX%),主修机器人学、计算机视觉、现代控制理论等核心课程,参与基于ROS的移动机器人课程设计,在团队中负责激光SLAM建图与路径规划模块开发,完成实验室环境下的自主导航演示,熟悉C++、Python编程及Linux开发环境,掌握OpenCV、PCL基础应用。
自我评价
培训经历
获得该认证后,将Kubernetes容器化编排知识应用于团队算法测试与部署流程,搭建了基于K8s的SLAM算法仿真测试集群,实现多版本算法镜像的快速部署与并行测试,将大规模场景数据的自动化回归测试效率提升了XXX%。
中级SLAM算法清晰简历模板
适用人群: #SLAM算法 #中级[3-5年]
关于SLAM算法简历的常见问题
[基本信息]
姓名:陈小湾
性别:男
年龄:26
学历:本科
婚姻:未婚
年限:4年
面貌:党员
邮箱:xiaowan@gangwan.com
电话:18600001654
[求职意向]
工作性质:全职
应聘职位:SLAM算法
期望城市:北京
期望薪资:8000-10000
求职状态:离职-随时到岗
[工作经历]
北京XX科技有限公司 | SLAM算法
2024-09 - 2025-12
XXX科技是专注机器人导航与高精地图服务的科技公司,团队规模约XXX人,核心业务是为商用服务机器人与工业AGV提供融合感知与定位解决方案,产品应用于超过XXX个室内外场景,与多家机器人整机厂商建立稳定合作。
工作概述:
1.算法开发:基于机器人项目需求,负责多传感器融合SLAM算法的设计、实现与调试;针对产品在弱纹理、动态环境下的定位漂移问题,引入图优化框架重构后端模块;通过融合视觉特征点与IMU预积分,提升里程计精度,将绝对轨迹误差降低XXX%。
2.模型部署:负责将开源视觉重定位模型适配于公司自研机器人平台;针对嵌入式设备算力约束,进行模型剪枝与量化操作;利用TensorRT加速推理流程,使模型在边缘计算单元上的单帧处理耗时从XXX毫秒降至XXX毫秒。
3.性能优化:分析激光SLAM在长廊场景下的建图退化问题;通过改进回环检测策略与增加运动约束,提升地图一致性;优化实时点云匹配算法,将大场景下的建图成功率从XXX%提升至XXX%,同时CPU占用率降低XXX%。
4.多传感器融合:为提升定位系统鲁棒性,设计并编码实现紧耦合的视觉-惯性-轮式里程计融合框架;搭建数据采集与标定平台,统一多源传感器的时间戳与坐标系;通过离线与在线标定流程,将融合系统的初始化时间缩短XXX%,外参标定精度提升XXX%。
5.代码维护:维护公司SLAM算法核心代码库,负责代码审查与版本管理;为解决不同项目间的代码复用问题,提炼公共模块并建立开发规范;引入自动化编译与单元测试流程,使新算法模块的集成效率提升XXX%,关键模块的单元测试覆盖率提升至XXX%。
6.技术方案:参与新项目技术评审,负责SLAM模块的技术可行性分析与方案制定;根据客户场景的具体约束,如算力、成本与精度要求,输出传感器选型与算法配置建议;通过仿真与实车测试验证方案,支持XXX个新项目成功落地。
工作业绩:
1.主导开发与优化X个核心SLAM算法模块,支撑公司主力机器人产品线定位导航功能,产品累计出货量超XXX台。
2.成功将XXX个AI视觉模型部署至嵌入式平台,模型推理精度损失控制在XXX%以内,满足产品实时性要求。
3.通过算法优化,解决X类典型场景的定位失效问题,相关技术应用于XXX个项目,客户投诉率下降XXX%。
4.建立的传感器标定与多源融合流程,成为团队标准操作程序,支撑后续X个新传感器型号的快速集成。
5.维护的代码库支撑团队X名工程师协同开发,代码质量显著提升,因算法实现错误导致的线上问题减少XXX%。
6.参与输出的技术方案文档达XXX份,有效指导项目预研与实施,助力公司成功拓展X个新行业应用。
[项目经历]
项目名称:仓储AGV高精度视觉惯性导航系统
担任角色:项目负责人
为解决公司仓储搬运AGV在货架密集、光照变化环境下的长期运行累计误差与初始化不便问题而启动的项目,原有纯激光方案在长走廊环境下易退化,且需预先铺设反射板,实施成本高、柔性差。项目目标是在无辅助标识的复杂室内场景下,实现厘米级定位精度与鲁棒的重定位能力,以支撑XXX台AGV的7x24小时混合调度作业。
项目业绩:
1.在XXX平米实景仓库中测试,系统绝对定位误差稳定在XXX厘米以内,满足项目精度指标,重定位成功率达XXX%。
2.相较于原有激光反射板方案,为新客户节省单项目实施成本约XXX%,部署周期缩短XXX%。
3.系统在目标AGV平台(CPU为i7-XXX,无独立GPU)上稳定运行,定位线程CPU峰值占用率低于XXX%,支持同时调度XXX台AGV。
4.该项目成果成为公司新一代导航系统标准配置,已成功应用于X家客户的智慧仓库项目,并获得客户验收好评。
[教育背景]
武汉理工大学
自动化 | 本科
GPA X.XX(专业前XX%),主修机器人学、计算机视觉、现代控制理论等核心课程,参与基于ROS的移动机器人课程设计,在团队中负责激光SLAM建图与路径规划模块开发,完成实验室环境下的自主导航演示,熟悉C++、Python编程及Linux开发环境,掌握OpenCV、PCL基础应用。