
 职场资讯
职场资讯
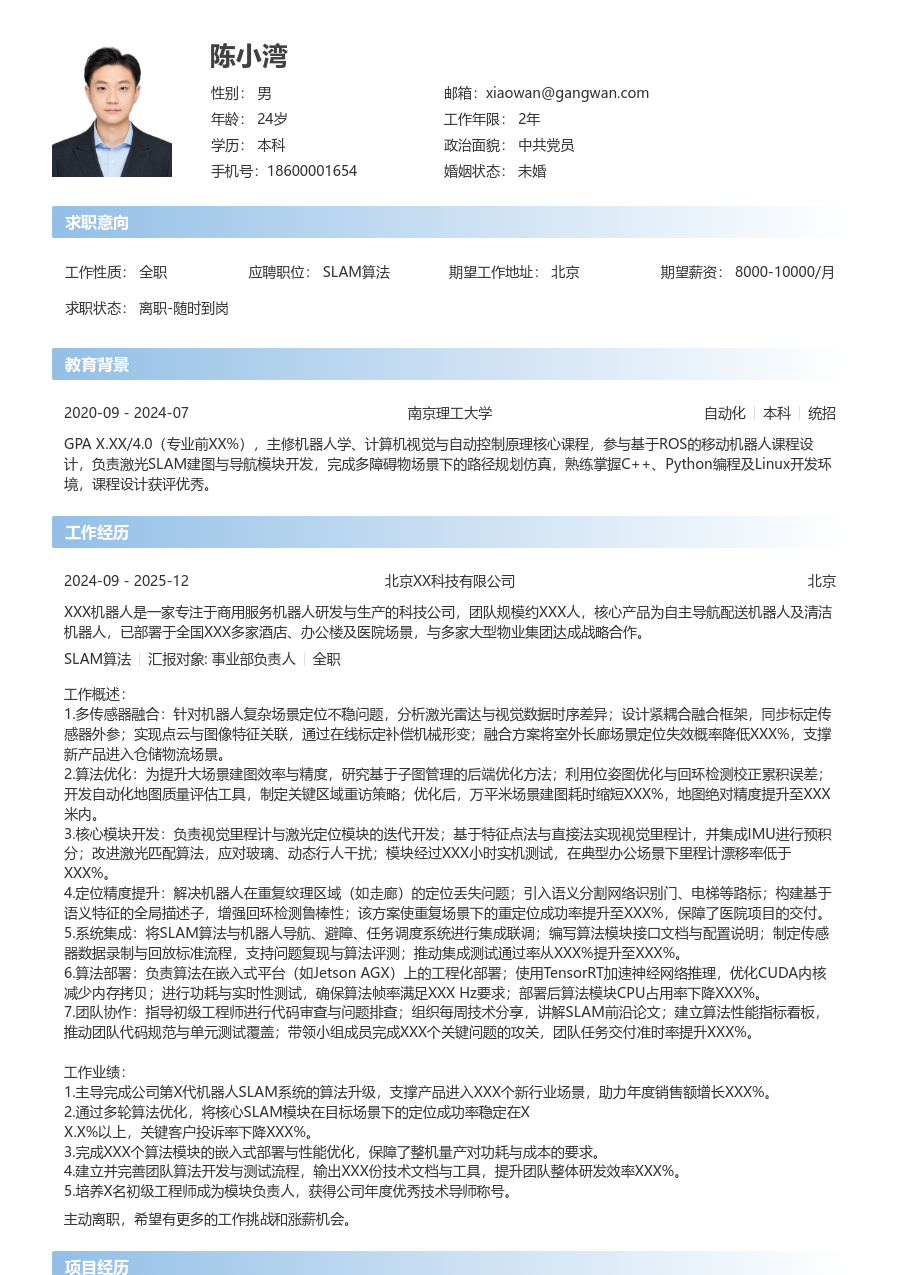
正在查看高级SLAM算法简约简历模板文字版
陈小湾
求职意向
工作经历
XXX机器人是一家专注于商用服务机器人研发与生产的科技公司,团队规模约XXX人,核心产品为自主导航配送机器人及清洁机器人,已部署于全国XXX多家酒店、办公楼及医院场景,与多家大型物业集团达成战略合作。
工作概述:
1.多传感器融合:针对机器人复杂场景定位不稳问题,分析激光雷达与视觉数据时序差异;设计紧耦合融合框架,同步标定传感器外参;实现点云与图像特征关联,通过在线标定补偿机械形变;融合方案将室外长廊场景定位失效概率降低XXX%,支撑新产品进入仓储物流场景。
2.算法优化:为提升大场景建图效率与精度,研究基于子图管理的后端优化方法;利用位姿图优化与回环检测校正累积误差;开发自动化地图质量评估工具,制定关键区域重访策略;优化后,万平米场景建图耗时缩短XXX%,地图绝对精度提升至XXX米内。
3.核心模块开发:负责视觉里程计与激光定位模块的迭代开发;基于特征点法与直接法实现视觉里程计,并集成IMU进行预积分;改进激光匹配算法,应对玻璃、动态行人干扰;模块经过XXX小时实机测试,在典型办公场景下里程计漂移率低于XXX%。
4.定位精度提升:解决机器人在重复纹理区域(如走廊)的定位丢失问题;引入语义分割网络识别门、电梯等路标;构建基于语义特征的全局描述子,增强回环检测鲁棒性;该方案使重复场景下的重定位成功率提升至XXX%,保障了医院项目的交付。
5.系统集成:将SLAM算法与机器人导航、避障、任务调度系统进行集成联调;编写算法模块接口文档与配置说明;制定传感器数据录制与回放标准流程,支持问题复现与算法评测;推动集成测试通过率从XXX%提升至XXX%。
6.算法部署:负责算法在嵌入式平台(如Jetson AGX)上的工程化部署;使用TensorRT加速神经网络推理,优化CUDA内核减少内存拷贝;进行功耗与实时性测试,确保算法帧率满足XXX Hz要求;部署后算法模块CPU占用率下降XXX%。
7.团队协作:指导初级工程师进行代码审查与问题排查;组织每周技术分享,讲解SLAM前沿论文;建立算法性能指标看板,推动团队代码规范与单元测试覆盖;带领小组成员完成XXX个关键问题的攻关,团队任务交付准时率提升XXX%。
工作业绩:
1.主导完成公司第X代机器人SLAM系统的算法升级,支撑产品进入XXX个新行业场景,助力年度销售额增长XXX%。
2.通过多轮算法优化,将核心SLAM模块在目标场景下的定位成功率稳定在X
X.X%以上,关键客户投诉率下降XXX%。
3.完成XXX个算法模块的嵌入式部署与性能优化,保障了整机量产对功耗与成本的要求。
4.建立并完善团队算法开发与测试流程,输出XXX份技术文档与工具,提升团队整体研发效率XXX%。
5.培养X名初级工程师成为模块负责人,获得公司年度优秀技术导师称号。
主动离职,希望有更多的工作挑战和涨薪机会。
项目经历
公司旗舰配送机器人项目的核心算法升级,旧有SLAM系统在室内外过渡区域(如大楼出入口)频繁定位丢失,单一激光方案无法应对室外强光与动态障碍物,导致订单配送失败率高达X%,日频次超过XXX次,严重制约产品在园区级场景的拓展。新系统需融合多线激光、视觉、IMU与轮速计,实现厘米级定位与无缝场景切换,以支撑客户XXX万平米科技园区的无人配送合同。
项目职责:
1.方案设计:负责技术方案选型与整体架构设计,确定以激光惯性里程计为主干、视觉辅助重定位的紧耦合方案;制定多传感器时间同步与空间标定流程。
2.融合算法开发:主导开发激光-惯性里程计核心算法,实现点云去畸变与特征提取;集成优化后的VINS视觉惯性模块,作为失效冗余与辅助观测。
3.地图管理:设计分层地图管理系统,支持全局语义地图与局部高精度栅格地图的融合与在线更新;开发地图自动拼接与冲突检测工具。
4.系统测试:构建涵盖室内、半开放、室外全场景的评测数据集;设计自动化测试流水线,量化评估定位精度、鲁棒性与计算资源消耗。
项目业绩:
1.新SLAM系统在室内外混合场景下的定位成功率从XX%提升至X
X.X%,园区级长距离运行(>XXX米)的轨迹误差低于X米。
2.成功支撑机器人产品落地XXX个大型园区项目,客户现场平均无故障运行时间(MTBF)超过XXX小时,订单配送失败率下降XXX%。
3.算法模块经过优化,在Jetson AGX平台上全频运行资源占用满足要求,为核心控制器节省XXX%的算力冗余。
4.该项目形成公司级SLAM标准方案,获得年度技术创新一等奖,相关技术申请发明专利X项。
教育背景
GPA X.XX/4.0(专业前XX%),主修机器人学、计算机视觉与自动控制原理核心课程,参与基于ROS的移动机器人课程设计,负责激光SLAM建图与导航模块开发,完成多障碍物场景下的路径规划仿真,熟练掌握C++、Python编程及Linux开发环境,课程设计获评优秀。
自我评价
培训经历
系统掌握ROS机器人操作系统的核心概念与高级功能,将标准化、模块化的开发理念应用于公司机器人软件框架重构,设计并实现了基于ROS的通用传感器驱动与算法模块接口规范,降低了算法团队与底层驱动团队的协作成本,新框架下模块复用率提升XXX%,集成调试效率提升XXX%。
高级SLAM算法简约简历模板
适用人群: #SLAM算法 #高级[5-10年]



关于SLAM算法简历的常见问题
[基本信息]
姓名:陈小湾
性别:男
年龄:26
学历:本科
婚姻:未婚
年限:4年
面貌:党员
邮箱:xiaowan@gangwan.com
电话:18600001654
[求职意向]
工作性质:全职
应聘职位:SLAM算法
期望城市:北京
期望薪资:8000-10000
求职状态:离职-随时到岗
[工作经历]
北京XX科技有限公司 | SLAM算法
2024-09 - 2025-12
XXX机器人是一家专注于商用服务机器人研发与生产的科技公司,团队规模约XXX人,核心产品为自主导航配送机器人及清洁机器人,已部署于全国XXX多家酒店、办公楼及医院场景,与多家大型物业集团达成战略合作。
工作概述:
1.多传感器融合:针对机器人复杂场景定位不稳问题,分析激光雷达与视觉数据时序差异;设计紧耦合融合框架,同步标定传感器外参;实现点云与图像特征关联,通过在线标定补偿机械形变;融合方案将室外长廊场景定位失效概率降低XXX%,支撑新产品进入仓储物流场景。
2.算法优化:为提升大场景建图效率与精度,研究基于子图管理的后端优化方法;利用位姿图优化与回环检测校正累积误差;开发自动化地图质量评估工具,制定关键区域重访策略;优化后,万平米场景建图耗时缩短XXX%,地图绝对精度提升至XXX米内。
3.核心模块开发:负责视觉里程计与激光定位模块的迭代开发;基于特征点法与直接法实现视觉里程计,并集成IMU进行预积分;改进激光匹配算法,应对玻璃、动态行人干扰;模块经过XXX小时实机测试,在典型办公场景下里程计漂移率低于XXX%。
4.定位精度提升:解决机器人在重复纹理区域(如走廊)的定位丢失问题;引入语义分割网络识别门、电梯等路标;构建基于语义特征的全局描述子,增强回环检测鲁棒性;该方案使重复场景下的重定位成功率提升至XXX%,保障了医院项目的交付。
5.系统集成:将SLAM算法与机器人导航、避障、任务调度系统进行集成联调;编写算法模块接口文档与配置说明;制定传感器数据录制与回放标准流程,支持问题复现与算法评测;推动集成测试通过率从XXX%提升至XXX%。
6.算法部署:负责算法在嵌入式平台(如Jetson AGX)上的工程化部署;使用TensorRT加速神经网络推理,优化CUDA内核减少内存拷贝;进行功耗与实时性测试,确保算法帧率满足XXX Hz要求;部署后算法模块CPU占用率下降XXX%。
7.团队协作:指导初级工程师进行代码审查与问题排查;组织每周技术分享,讲解SLAM前沿论文;建立算法性能指标看板,推动团队代码规范与单元测试覆盖;带领小组成员完成XXX个关键问题的攻关,团队任务交付准时率提升XXX%。
工作业绩:
1.主导完成公司第X代机器人SLAM系统的算法升级,支撑产品进入XXX个新行业场景,助力年度销售额增长XXX%。
2.通过多轮算法优化,将核心SLAM模块在目标场景下的定位成功率稳定在X
X.X%以上,关键客户投诉率下降XXX%。
3.完成XXX个算法模块的嵌入式部署与性能优化,保障了整机量产对功耗与成本的要求。
4.建立并完善团队算法开发与测试流程,输出XXX份技术文档与工具,提升团队整体研发效率XXX%。
5.培养X名初级工程师成为模块负责人,获得公司年度优秀技术导师称号。
[项目经历]
项目名称:高精度室内外一体化机器人导航SLAM系统升级
担任角色:项目负责人
公司旗舰配送机器人项目的核心算法升级,旧有SLAM系统在室内外过渡区域(如大楼出入口)频繁定位丢失,单一激光方案无法应对室外强光与动态障碍物,导致订单配送失败率高达X%,日频次超过XXX次,严重制约产品在园区级场景的拓展。新系统需融合多线激光、视觉、IMU与轮速计,实现厘米级定位与无缝场景切换,以支撑客户XXX万平米科技园区的无人配送合同。
项目业绩:
1.新SLAM系统在室内外混合场景下的定位成功率从XX%提升至X
X.X%,园区级长距离运行(>XXX米)的轨迹误差低于X米。
2.成功支撑机器人产品落地XXX个大型园区项目,客户现场平均无故障运行时间(MTBF)超过XXX小时,订单配送失败率下降XXX%。
3.算法模块经过优化,在Jetson AGX平台上全频运行资源占用满足要求,为核心控制器节省XXX%的算力冗余。
4.该项目形成公司级SLAM标准方案,获得年度技术创新一等奖,相关技术申请发明专利X项。
[教育背景]
南京理工大学
自动化 | 本科
GPA X.XX/4.0(专业前XX%),主修机器人学、计算机视觉与自动控制原理核心课程,参与基于ROS的移动机器人课程设计,负责激光SLAM建图与导航模块开发,完成多障碍物场景下的路径规划仿真,熟练掌握C++、Python编程及Linux开发环境,课程设计获评优秀。