
 职场资讯
职场资讯
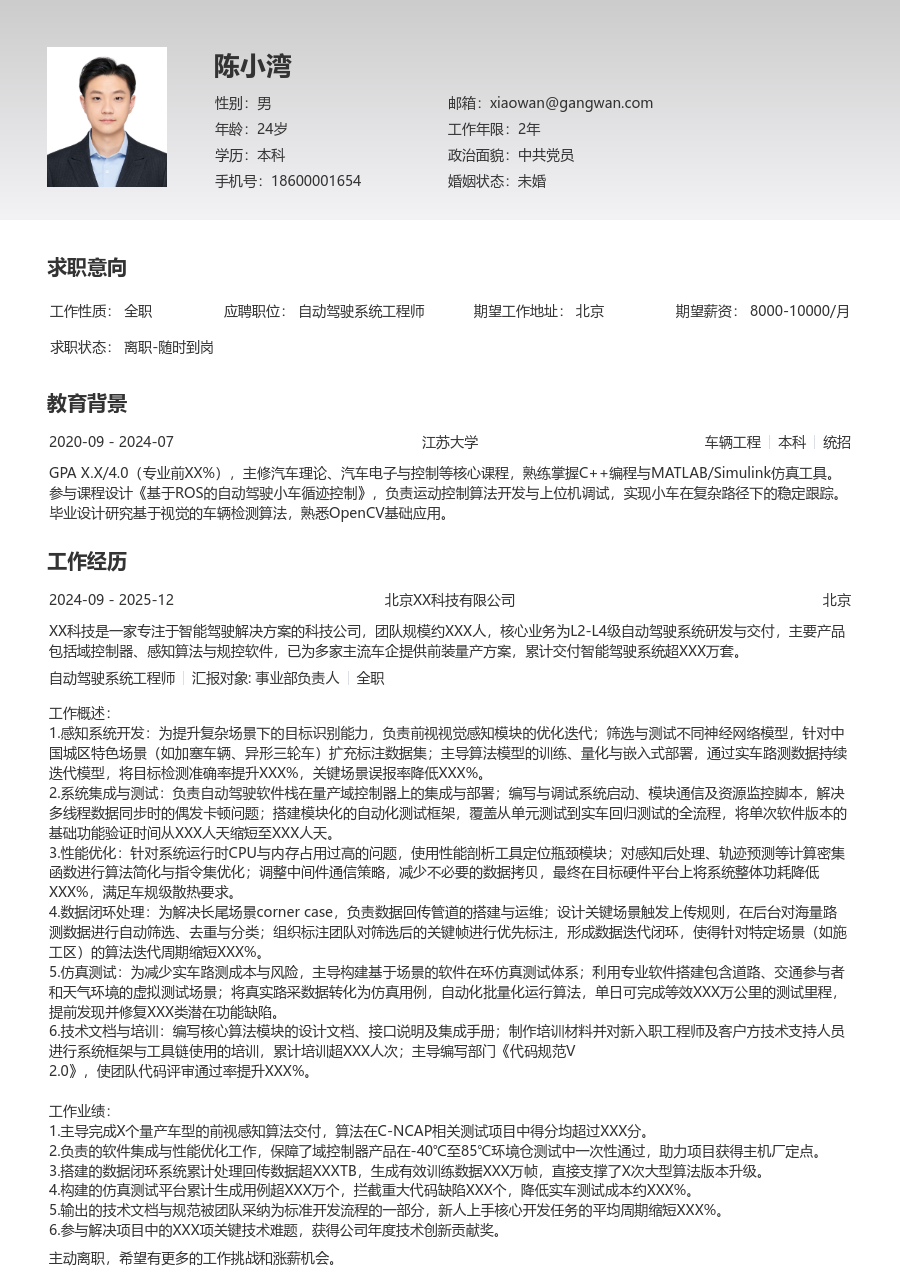
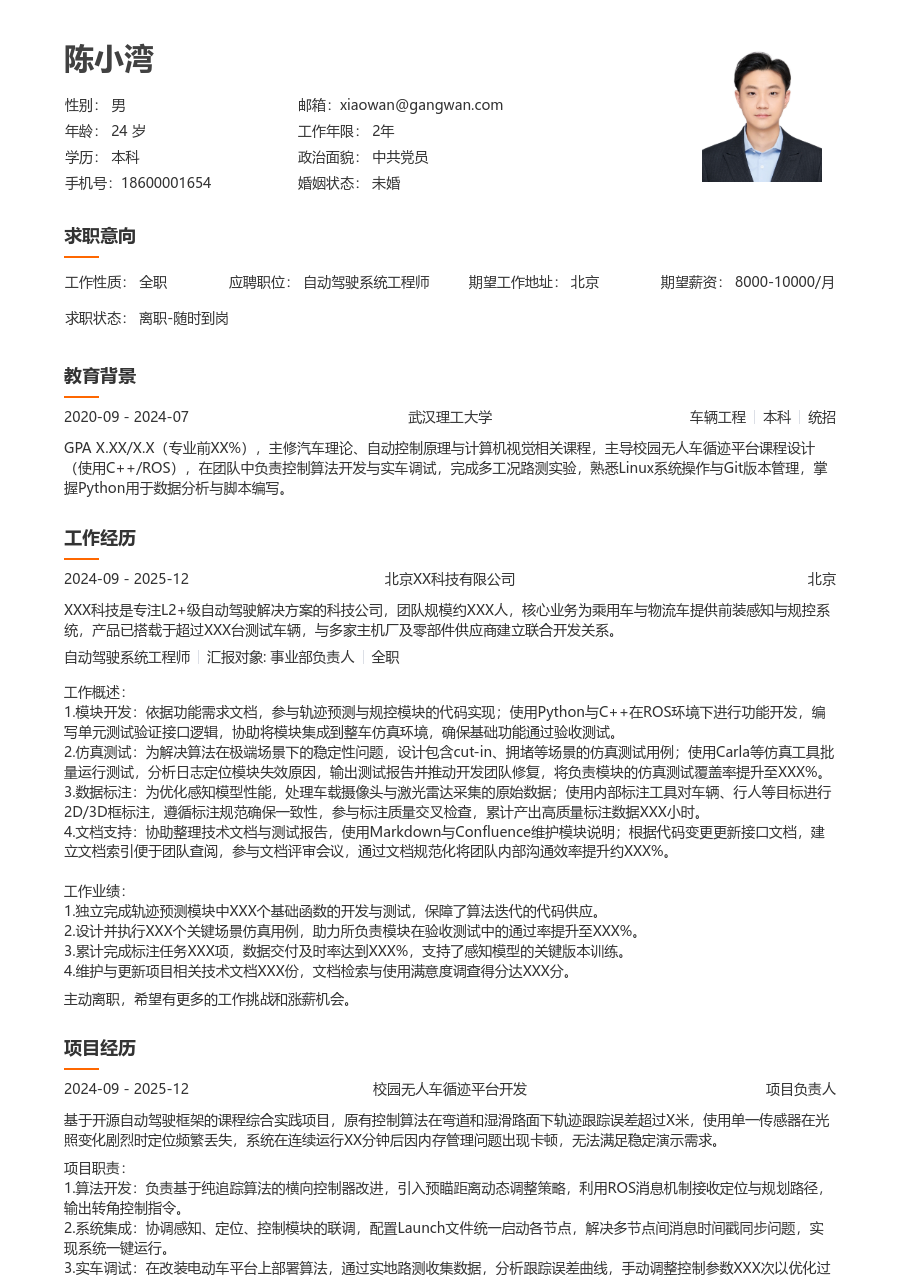
正在查看3-5年经验自动驾驶系统工程师简历模板(清晰排版)文字版
陈小湾
求职意向
工作经历
XX科技是一家专注于智能驾驶解决方案的科技公司,团队规模约XXX人,核心业务为L2-L4级自动驾驶系统研发与交付,主要产品包括域控制器、感知算法与规控软件,已为多家主流车企提供前装量产方案,累计交付智能驾驶系统超XXX万套。
工作概述:
1.感知系统开发:为提升复杂场景下的目标识别能力,负责前视视觉感知模块的优化迭代;筛选与测试不同神经网络模型,针对中国城区特色场景(如加塞车辆、异形三轮车)扩充标注数据集;主导算法模型的训练、量化与嵌入式部署,通过实车路测数据持续迭代模型,将目标检测准确率提升XXX%,关键场景误报率降低XXX%。
2.系统集成与测试:负责自动驾驶软件栈在量产域控制器上的集成与部署;编写与调试系统启动、模块通信及资源监控脚本,解决多线程数据同步时的偶发卡顿问题;搭建模块化的自动化测试框架,覆盖从单元测试到实车回归测试的全流程,将单次软件版本的基础功能验证时间从XXX人天缩短至XXX人天。
3.性能优化:针对系统运行时CPU与内存占用过高的问题,使用性能剖析工具定位瓶颈模块;对感知后处理、轨迹预测等计算密集函数进行算法简化与指令集优化;调整中间件通信策略,减少不必要的数据拷贝,最终在目标硬件平台上将系统整体功耗降低XXX%,满足车规级散热要求。
4.数据闭环处理:为解决长尾场景corner case,负责数据回传管道的搭建与运维;设计关键场景触发上传规则,在后台对海量路测数据进行自动筛选、去重与分类;组织标注团队对筛选后的关键帧进行优先标注,形成数据迭代闭环,使得针对特定场景(如施工区)的算法迭代周期缩短XXX%。
5.仿真测试:为减少实车路测成本与风险,主导构建基于场景的软件在环仿真测试体系;利用专业软件搭建包含道路、交通参与者和天气环境的虚拟测试场景;将真实路采数据转化为仿真用例,自动化批量化运行算法,单日可完成等效XXX万公里的测试里程,提前发现并修复XXX类潜在功能缺陷。
6.技术文档与培训:编写核心算法模块的设计文档、接口说明及集成手册;制作培训材料并对新入职工程师及客户方技术支持人员进行系统框架与工具链使用的培训,累计培训超XXX人次;主导编写部门《代码规范V
2.0》,使团队代码评审通过率提升XXX%。
工作业绩:
1.主导完成X个量产车型的前视感知算法交付,算法在C-NCAP相关测试项目中得分均超过XXX分。
2.负责的软件集成与性能优化工作,保障了域控制器产品在-40℃至85℃环境仓测试中一次性通过,助力项目获得主机厂定点。
3.搭建的数据闭环系统累计处理回传数据超XXXTB,生成有效训练数据XXX万帧,直接支撑了X次大型算法版本升级。
4.构建的仿真测试平台累计生成用例超XXX万个,拦截重大代码缺陷XXX个,降低实车测试成本约XXX%。
5.输出的技术文档与规范被团队采纳为标准开发流程的一部分,新人上手核心开发任务的平均周期缩短XXX%。
6.参与解决项目中的XXX项关键技术难题,获得公司年度技术创新贡献奖。
主动离职,希望有更多的工作挑战和涨薪机会。
项目经历
公司首个面向城区复杂道路的L2+级自动驾驶量产项目,目标在指定的高端车型上实现城市道路内的自动跟车、车道保持、导航变道及路口通行功能。原有高速巡航系统无法应对城区人车混流、无保护左转等动态场景,感知模块在密集车流中漏检率与误检率较高,规划控制模块在极端场景下决策犹豫,导致用户接管频繁,初期实车路测平均每百公里接管次数高达X.X次。
项目职责:
1.功能开发:负责多传感器融合感知模块中视觉与毫米波雷达的前融合算法开发与调试,设计数据关联与目标跟踪策略,提升对切入切出车辆的稳定跟踪能力。
2.算法优化:主导规划控制模块中行为预测子模块的优化,引入基于语义地图的意图预测模型,优化对行人、非机动车的轨迹预测准确率,将路口场景的预测误差平均降低XXX%。
3.系统集成:负责将优化后的感知、预测、规划全链路算法集成至量产域控制器,解决不同团队代码合并后的编译与运行时问题,保证系统在资源受限环境下稳定运行。
4.实车调试与闭环:主导在指定试点城市进行大规模实车路测,定义关键场景数据采集标准,基于路测badcase数据驱动算法迭代超过X个主要版本,形成从问题发现到模型更新的完整闭环。
项目业绩:
1.系统核心性能指标大幅提升,目标检测召回率达到X
X.X%,误检率降低至
X.X%,在试点城市复杂路段测试中,平均百公里接管次数从
X.X次下降至
X.X次。
2.项目按期交付并实现SOP,成功搭载于X款量产车型,累计装车量超XXX万台,获得主机厂项目质量奖。
3.通过算法优化与代码重构,系统在域控制器上的计算帧率稳定在XX Hz,满足车规级功能安全与实时性要求。
4.建立的标准化的实车测试-数据回传-算法迭代流程,被复制到后续X个量产项目中,团队整体开发效率提升约XXX%。
教育背景
GPA X.X/4.0(专业前XX%),主修汽车理论、汽车电子与控制等核心课程,熟练掌握C++编程与MATLAB/Simulink仿真工具。参与课程设计《基于ROS的自动驾驶小车循迹控制》,负责运动控制算法开发与上位机调试,实现小车在复杂路径下的稳定跟踪。毕业设计研究基于视觉的车辆检测算法,熟悉OpenCV基础应用。
自我评价
培训经历
获得功能安全工程师认证,系统掌握ISO 26262标准在汽车电子领域的应用。在城区领航辅助驾驶项目中,主导负责感知模块的功能安全概念设计及技术安全需求分解,编写相关安全分析文档(如FMEA)。将安全需求贯彻至软件架构设计,并通过增加冗余校验、设计安全监控机制等方式实现安全机制,推动团队建立安全相关的代码走查与测试用例库,助力项目ASPICE评估中软件测试相关项的通过率提升XXX%。
3-5年经验自动驾驶系统工程师简历模板(清晰排版)
适用人群: #自动驾驶系统工程师 #中级[3-5年]




猜你想用
关于自动驾驶系统工程师简历的常见问题
[基本信息]
姓名:陈小湾
性别:男
年龄:26
学历:本科
婚姻:未婚
年限:4年
面貌:党员
邮箱:xiaowan@gangwan.com
电话:18600001654
[求职意向]
工作性质:全职
应聘职位:自动驾驶系统工程师
期望城市:北京
期望薪资:8000-10000
求职状态:离职-随时到岗
[工作经历]
北京XX科技有限公司 | 自动驾驶系统工程师
2024-09 - 2025-12
XX科技是一家专注于智能驾驶解决方案的科技公司,团队规模约XXX人,核心业务为L2-L4级自动驾驶系统研发与交付,主要产品包括域控制器、感知算法与规控软件,已为多家主流车企提供前装量产方案,累计交付智能驾驶系统超XXX万套。
工作概述:
1.感知系统开发:为提升复杂场景下的目标识别能力,负责前视视觉感知模块的优化迭代;筛选与测试不同神经网络模型,针对中国城区特色场景(如加塞车辆、异形三轮车)扩充标注数据集;主导算法模型的训练、量化与嵌入式部署,通过实车路测数据持续迭代模型,将目标检测准确率提升XXX%,关键场景误报率降低XXX%。
2.系统集成与测试:负责自动驾驶软件栈在量产域控制器上的集成与部署;编写与调试系统启动、模块通信及资源监控脚本,解决多线程数据同步时的偶发卡顿问题;搭建模块化的自动化测试框架,覆盖从单元测试到实车回归测试的全流程,将单次软件版本的基础功能验证时间从XXX人天缩短至XXX人天。
3.性能优化:针对系统运行时CPU与内存占用过高的问题,使用性能剖析工具定位瓶颈模块;对感知后处理、轨迹预测等计算密集函数进行算法简化与指令集优化;调整中间件通信策略,减少不必要的数据拷贝,最终在目标硬件平台上将系统整体功耗降低XXX%,满足车规级散热要求。
4.数据闭环处理:为解决长尾场景corner case,负责数据回传管道的搭建与运维;设计关键场景触发上传规则,在后台对海量路测数据进行自动筛选、去重与分类;组织标注团队对筛选后的关键帧进行优先标注,形成数据迭代闭环,使得针对特定场景(如施工区)的算法迭代周期缩短XXX%。
5.仿真测试:为减少实车路测成本与风险,主导构建基于场景的软件在环仿真测试体系;利用专业软件搭建包含道路、交通参与者和天气环境的虚拟测试场景;将真实路采数据转化为仿真用例,自动化批量化运行算法,单日可完成等效XXX万公里的测试里程,提前发现并修复XXX类潜在功能缺陷。
6.技术文档与培训:编写核心算法模块的设计文档、接口说明及集成手册;制作培训材料并对新入职工程师及客户方技术支持人员进行系统框架与工具链使用的培训,累计培训超XXX人次;主导编写部门《代码规范V
2.0》,使团队代码评审通过率提升XXX%。
工作业绩:
1.主导完成X个量产车型的前视感知算法交付,算法在C-NCAP相关测试项目中得分均超过XXX分。
2.负责的软件集成与性能优化工作,保障了域控制器产品在-40℃至85℃环境仓测试中一次性通过,助力项目获得主机厂定点。
3.搭建的数据闭环系统累计处理回传数据超XXXTB,生成有效训练数据XXX万帧,直接支撑了X次大型算法版本升级。
4.构建的仿真测试平台累计生成用例超XXX万个,拦截重大代码缺陷XXX个,降低实车测试成本约XXX%。
5.输出的技术文档与规范被团队采纳为标准开发流程的一部分,新人上手核心开发任务的平均周期缩短XXX%。
6.参与解决项目中的XXX项关键技术难题,获得公司年度技术创新贡献奖。
[项目经历]
项目名称:城区领航辅助驾驶系统量产项目
担任角色:项目负责人
公司首个面向城区复杂道路的L2+级自动驾驶量产项目,目标在指定的高端车型上实现城市道路内的自动跟车、车道保持、导航变道及路口通行功能。原有高速巡航系统无法应对城区人车混流、无保护左转等动态场景,感知模块在密集车流中漏检率与误检率较高,规划控制模块在极端场景下决策犹豫,导致用户接管频繁,初期实车路测平均每百公里接管次数高达X.X次。
项目业绩:
1.系统核心性能指标大幅提升,目标检测召回率达到X
X.X%,误检率降低至
X.X%,在试点城市复杂路段测试中,平均百公里接管次数从
X.X次下降至
X.X次。
2.项目按期交付并实现SOP,成功搭载于X款量产车型,累计装车量超XXX万台,获得主机厂项目质量奖。
3.通过算法优化与代码重构,系统在域控制器上的计算帧率稳定在XX Hz,满足车规级功能安全与实时性要求。
4.建立的标准化的实车测试-数据回传-算法迭代流程,被复制到后续X个量产项目中,团队整体开发效率提升约XXX%。
[教育背景]
江苏大学
车辆工程 | 本科
GPA X.X/4.0(专业前XX%),主修汽车理论、汽车电子与控制等核心课程,熟练掌握C++编程与MATLAB/Simulink仿真工具。参与课程设计《基于ROS的自动驾驶小车循迹控制》,负责运动控制算法开发与上位机调试,实现小车在复杂路径下的稳定跟踪。毕业设计研究基于视觉的车辆检测算法,熟悉OpenCV基础应用。