
 职场资讯
职场资讯
正在查看在校生自动驾驶系统工程师清新简历模板文字版
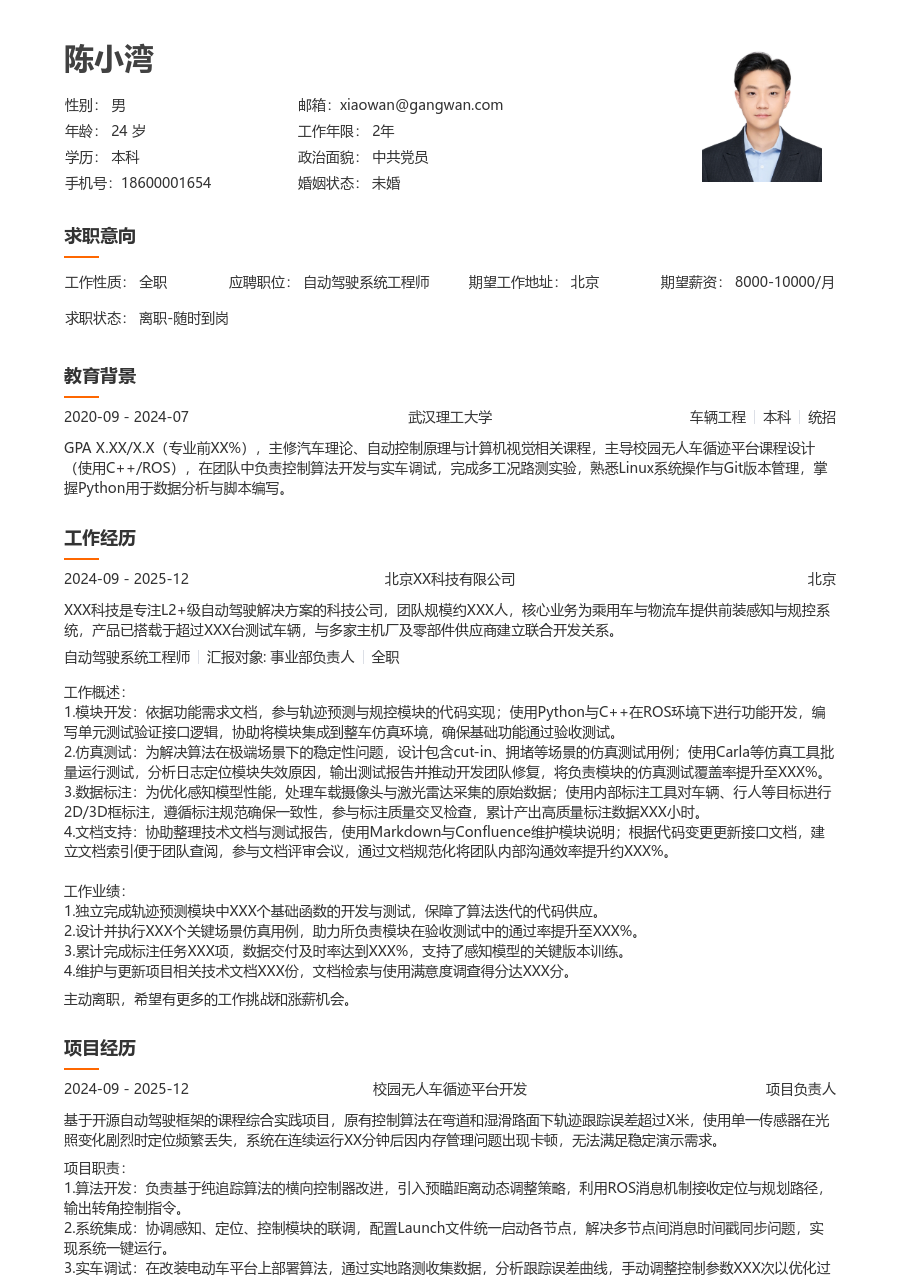
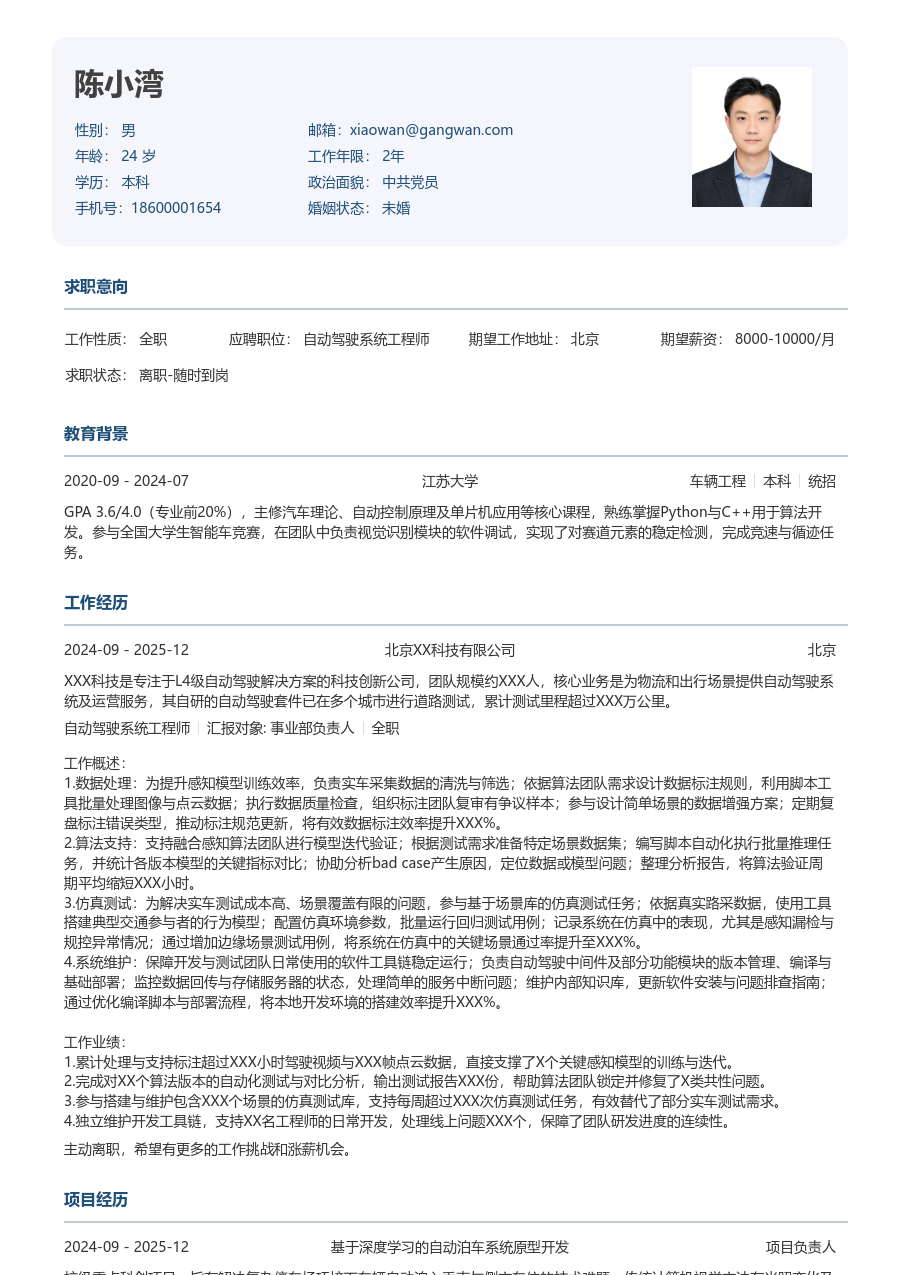
陈小湾
求职意向
工作经历
XXX科技是专注L2+级自动驾驶解决方案的科技公司,团队规模约XXX人,核心业务为乘用车与物流车提供前装感知与规控系统,产品已搭载于超过XXX台测试车辆,与多家主机厂及零部件供应商建立联合开发关系。
工作概述:
1.模块开发:依据功能需求文档,参与轨迹预测与规控模块的代码实现;使用Python与C++在ROS环境下进行功能开发,编写单元测试验证接口逻辑,协助将模块集成到整车仿真环境,确保基础功能通过验收测试。
2.仿真测试:为解决算法在极端场景下的稳定性问题,设计包含cut-in、拥堵等场景的仿真测试用例;使用Carla等仿真工具批量运行测试,分析日志定位模块失效原因,输出测试报告并推动开发团队修复,将负责模块的仿真测试覆盖率提升至XXX%。
3.数据标注:为优化感知模型性能,处理车载摄像头与激光雷达采集的原始数据;使用内部标注工具对车辆、行人等目标进行2D/3D框标注,遵循标注规范确保一致性,参与标注质量交叉检查,累计产出高质量标注数据XXX小时。
4.文档支持:协助整理技术文档与测试报告,使用Markdown与Confluence维护模块说明;根据代码变更更新接口文档,建立文档索引便于团队查阅,参与文档评审会议,通过文档规范化将团队内部沟通效率提升约XXX%。
工作业绩:
1.独立完成轨迹预测模块中XXX个基础函数的开发与测试,保障了算法迭代的代码供应。
2.设计并执行XXX个关键场景仿真用例,助力所负责模块在验收测试中的通过率提升至XXX%。
3.累计完成标注任务XXX项,数据交付及时率达到XXX%,支持了感知模型的关键版本训练。
4.维护与更新项目相关技术文档XXX份,文档检索与使用满意度调查得分达XXX分。
主动离职,希望有更多的工作挑战和涨薪机会。
项目经历
基于开源自动驾驶框架的课程综合实践项目,原有控制算法在弯道和湿滑路面下轨迹跟踪误差超过X米,使用单一传感器在光照变化剧烈时定位频繁丢失,系统在连续运行XX分钟后因内存管理问题出现卡顿,无法满足稳定演示需求。
项目职责:
1.算法开发:负责基于纯追踪算法的横向控制器改进,引入预瞄距离动态调整策略,利用ROS消息机制接收定位与规划路径,输出转角控制指令。
2.系统集成:协调感知、定位、控制模块的联调,配置Launch文件统一启动各节点,解决多节点间消息时间戳同步问题,实现系统一键运行。
3.实车调试:在改装电动车平台上部署算法,通过实地路测收集数据,分析跟踪误差曲线,手动调整控制参数XXX次以优化过弯平顺性。
项目业绩:
1.将车辆在典型弯道的轨迹跟踪误差从X米降低至Y米,控制频率稳定在XX Hz。
2.实现系统连续稳定运行XX分钟无卡顿或崩溃,成功完成长度为XXX米的封闭场地循环演示。
3.项目代码库被收录为学院优质课程设计案例,后续有XXX名同学参考进行开发。
教育背景
GPA X.XX/X.X(专业前XX%),主修汽车理论、自动控制原理与计算机视觉相关课程,主导校园无人车循迹平台课程设计(使用C++/ROS),在团队中负责控制算法开发与实车调试,完成多工况路测实验,熟悉Linux系统操作与Git版本管理,掌握Python用于数据分析与脚本编写。
自我评价
培训经历
获得该认证,将ROS知识应用于校园无人车项目,通过优化节点通信与资源管理,解决系统长期运行的稳定性问题,同时编写的模块集成指南成为团队开发参考文档。
在校生自动驾驶系统工程师清新简历模板
适用人群: #自动驾驶系统工程师 #在校生[找实习]




猜你想用
关于自动驾驶系统工程师简历的常见问题
[基本信息]
姓名:陈小湾
性别:男
年龄:26
学历:本科
婚姻:未婚
年限:4年
面貌:党员
邮箱:xiaowan@gangwan.com
电话:18600001654
[求职意向]
工作性质:全职
应聘职位:自动驾驶系统工程师
期望城市:北京
期望薪资:8000-10000
求职状态:离职-随时到岗
[工作经历]
北京XX科技有限公司 | 自动驾驶系统工程师
2024-09 - 2025-12
XXX科技是专注L2+级自动驾驶解决方案的科技公司,团队规模约XXX人,核心业务为乘用车与物流车提供前装感知与规控系统,产品已搭载于超过XXX台测试车辆,与多家主机厂及零部件供应商建立联合开发关系。
工作概述:
1.模块开发:依据功能需求文档,参与轨迹预测与规控模块的代码实现;使用Python与C++在ROS环境下进行功能开发,编写单元测试验证接口逻辑,协助将模块集成到整车仿真环境,确保基础功能通过验收测试。
2.仿真测试:为解决算法在极端场景下的稳定性问题,设计包含cut-in、拥堵等场景的仿真测试用例;使用Carla等仿真工具批量运行测试,分析日志定位模块失效原因,输出测试报告并推动开发团队修复,将负责模块的仿真测试覆盖率提升至XXX%。
3.数据标注:为优化感知模型性能,处理车载摄像头与激光雷达采集的原始数据;使用内部标注工具对车辆、行人等目标进行2D/3D框标注,遵循标注规范确保一致性,参与标注质量交叉检查,累计产出高质量标注数据XXX小时。
4.文档支持:协助整理技术文档与测试报告,使用Markdown与Confluence维护模块说明;根据代码变更更新接口文档,建立文档索引便于团队查阅,参与文档评审会议,通过文档规范化将团队内部沟通效率提升约XXX%。
工作业绩:
1.独立完成轨迹预测模块中XXX个基础函数的开发与测试,保障了算法迭代的代码供应。
2.设计并执行XXX个关键场景仿真用例,助力所负责模块在验收测试中的通过率提升至XXX%。
3.累计完成标注任务XXX项,数据交付及时率达到XXX%,支持了感知模型的关键版本训练。
4.维护与更新项目相关技术文档XXX份,文档检索与使用满意度调查得分达XXX分。
[项目经历]
项目名称:校园无人车循迹平台开发
担任角色:项目负责人
基于开源自动驾驶框架的课程综合实践项目,原有控制算法在弯道和湿滑路面下轨迹跟踪误差超过X米,使用单一传感器在光照变化剧烈时定位频繁丢失,系统在连续运行XX分钟后因内存管理问题出现卡顿,无法满足稳定演示需求。
项目业绩:
1.将车辆在典型弯道的轨迹跟踪误差从X米降低至Y米,控制频率稳定在XX Hz。
2.实现系统连续稳定运行XX分钟无卡顿或崩溃,成功完成长度为XXX米的封闭场地循环演示。
3.项目代码库被收录为学院优质课程设计案例,后续有XXX名同学参考进行开发。
[教育背景]
武汉理工大学
车辆工程 | 本科
GPA X.XX/X.X(专业前XX%),主修汽车理论、自动控制原理与计算机视觉相关课程,主导校园无人车循迹平台课程设计(使用C++/ROS),在团队中负责控制算法开发与实车调试,完成多工况路测实验,熟悉Linux系统操作与Git版本管理,掌握Python用于数据分析与脚本编写。